Rendimiento de los sistemas para mantenerse en el carril (LSS) en alineaciones curvilíneas
Performance of Lane Support Systems (LSS) in curvilinear alignments
Artículos
Recibido: 03/09/2020
Aprobado: 03/10/2020
Autores
Cafiso Salvatore
Pappalardo Giuseppina
Resumen
Los sistemas para mantenerse en el carril (LSS) se basan en la visión artificial y se espera que ellos brinden beneficios de seguridad. No obstante, a pesar de la supuesta preparación tecnológica, todavía hay mucha incertidumbre con respecto a las necesidades de los sistemas de visión para "leer" la carretera, ya que son limitados los resultados que están disponibles en las pruebas de campo. En tal marco, se desarrolló una prueba experimental de desempeño LSS que fue realizada en carreteras rurales de dos carriles con diferentes alineaciones geométricas. Las fallas de LSS, en condiciones de luz diurna y pavimento seco, fueron detectadas en promedio en un 2% de los tramos de la vía, pero con diferencias significativas en función del radio de curvatura horizontal. Adicional, se observó un aumento de la probabilidad de falla al 8% en los tramos de carretera con un radio de menos de 200 m. Un radio de curvatura de 200 m es una restricción geométrica relevante en carreteras de montaña donde las curvas con un radio menor son usuales.
Abstract
Lane support systems (LSS) are based on computer vision and they are expected to give safety benefits. However, despite the assumed technology readiness, there is still a lot of uncertainty regarding the needs of vision systems for “reading” the road and limited results are still available from in-field testing. In this framework an experimental test of LSS performance was carried out in two-lane rural roads with different geometric alignments. LSS faults in daylight and dry pavement conditions were detected on average in 2 % of the road sections, but with significant differences basing on horizontal curvature radius. Additionally, the increase of fault probability of failure to 8% was observed in road sections with a radius of less than 200 m. A curvature radius of 200 m is a relevant geometric constrain in mountain roads in which curves with a smaller radius are common.
1. Introducción
Con base en la definición dada por la norma SAE J3016 [1], es posible identificar cinco etapas de progreso en la automatización de la conducción, que van desde la asistencia al conductor (nivel 1) hasta un vehículo completamente automatizado (nivel 5). También se tiene un nivel sin automatización (nivel 0). Actualmente, las tecnologías más avanzadas en el mercado son SAE nivel 2 “automatización parcial”; y, a partir del 2022, las tecnologías de seguridad serán obligatorias en los nuevos vehículos europeos. Las nuevas características de seguridad obligatorias, para automóviles y camionetas, incluyen los sistemas para mantenerse en el carril (Lane Support Systems –LSS–). El LSS puede detectar que está a punto de producirse un cambio de carril y advertir al conductor mediante varios métodos: hápticos, visuales y audibles (nivel 1) e incluso dirigir activamente el vehículo de regreso al carril (nivel 2).
Desde el punto de vista de la seguridad, si se asume que el sistema es 100% confiable, los sistemas de soporte de carril en los niveles 1 y 2 se pueden comparar con las bandas sonoras; para las cuales, la disponibilidad de datos de muchos años de instalaciones, permite evaluar una efectividad de seguridad reduciendo los choques severos cuando se salen del carril en aproximadamente un 30%. La diferencia clara es que las bandas sonoras en la carretera se dirigen a todos los automóviles, en el sitio donde se colocaron, mientras que los sistemas en el vehículo se dirigen al automóvil.
Los sistemas para mantenerse en el carril tienen la ventaja de abordar la salida del carril en todos los sitios. Sin embargo, el rendimiento del LSS puede verse afectado por el mal funcionamiento del mismo debido a factores internos o fallas relacionadas con las características de la carretera (la calidad de la señalización) y factores ambientales (la luz o el clima). Un estudio reciente [2] ha estimado la prevención de accidentes, asumiendo diferentes tasas de efectividad de LSS que van del 20% al 100%. Es importante aclarar, que los factores viales que afectan la efectividad del LSS no están claramente identificados ni definidos cuantitativamente debido a la falta de literatura de referencia.
En los niveles 3 y 4, el rol del LSS será más crítico porque cuando se usa para la navegación, una falla del sistema puede producir la desconexión de la automatización con la fase crítica de retroceso hacia el conductor. Así, el objetivo del artículo es proporcionar más conocimiento sobre el rendimiento del LSS y la probabilidad de fallas con especial énfasis en los efectos de la alineación horizontal.
2. Tecnología de los sistemas para mantenerse en el carril
Para detectar una marca en el pavimento, la característica principal en la imagen digital es el contraste entre los píxeles de la marca del pavimento y los de la carretera. El contraste se logra cuando los números altos de píxeles están cerca de números bajos. Las pruebas y la certificación LSS, según lo definido por las normas ISO y EN [3, 4- 5], para LSS consideran el pavimento seco, visibilidad diurna, buena calidad de señalización, alineación horizontal y recta o radio de curva superior a 250 m y velocidad constante durante la prueba. En lo que respecta a la señalización vial, la directiva enmendada sobre la gestión de la seguridad de la infraestructura vial [6], destaca la importancia de la legibilidad y la detectabilidad de las marcas y señales viales por parte de conductores humanos y también de sistemas automatizados de asistencia al conductor.
El informe técnico de Austroads AP-T347-19 [7], proporciona una amplia revisión de la literatura internacional, las iniciativas y las lecciones aprendidas de las pruebas de campo, complementadas con el compromiso entre las partes interesadas de la industria local e internacional. Una de las conclusiones que arrojó este documento fue que no solo debe considerarse la calidad de la señalización (reflectividad, ancho, tamaño) y consistencia (continuidad, variación, posición y formato) que afectan el desempeño del LSS, sino también la geometría de la carretera (sección transversal, alineación horizontal y vertical) y las condiciones del pavimento (agrietamiento, sellado, parcheo y contraste).
3. Recolección de datos
Las pruebas de campo en vías públicas ofrecen un "laboratorio del mundo real" para respaldar los ensayos y la evaluación de los sistemas de conducción automática (Automated Driving System –ADS–) que se pueden complementar y validar con otras de simulación y modelado en una pista cerrada. Además, expone los sistemas a una variedad extremadamente amplia de condiciones del mundo real.
Entonces, se utilizó el Analizador Automático de Carreteras (ARAN) disponible en el Laboratorio de Infraestructura de Transporte de la Universidad de Catania [8, 9] para adquirir medidas de las características geométricas de la carretera (sección transversal, pendientes, alineación horizontal y vertical). Adicional, el equipo de adquisición de ARAN se combinó adicionalmente con un sistema Mobileye 6.0 [10], que utiliza una cámara digital ubicada en el parabrisas delantero dentro del vehículo (Figura 1). Este equipo representa el estado del arte en sistemas basados en visión y muchos fabricantes de automóviles, incluidos Audi, Mercedes Benz y Volvo, utilizan este sensor para sus aplicaciones semiautónomas.
Figura 1. Instalación dentro del vehículo del Mobileye 6

Los eventos en los que el LSS no pudo detectar la marca del carril se identificaron y sincronizaron con los demás datos recopilados por ARAN. Como primera etapa del estudio y con el fin de evaluar el rendimiento del sistema en condiciones de prueba similares a las normas ISO / EU, el experimento se llevó a cabo en condiciones de luz natural y sobre el pavimento seco. La señalización fue visible con un coeficiente de iluminación difusa Qd> 100 mcd / m² / lx [5][11].
4. Resultados
Se realizaron varios recorridos por el ARAN a diferentes velocidades, con lo que se recolectaron datos para un total de 76 km de carreteras en 1934 secciones. Los estadísticos resumidos de las variables en la base de datos se muestran en la Tabla 1.
Tabla 1. Los estadísticos resumidos de las variables en la base de datos recolectados
| Característica | Estadístico descriptivo | ||||
| N | Mínimo | Máximo | Promedio | Desviación | |
| 1/R (1/m) | 1934 | 0 | 0,0221 | 0,0024 | 0,0033 |
| Velocidad promedio (km/h) | 1934 | 35,00 | 84,00 | 55,81 | 10,87 |
| Longitud de la sección (m) | 1934 | 20,00 | 65,00 | 39,26 | 5,17 |
La alta variabilidad de la velocidad en los diferentes recorridos (Figura 2), resultó en una baja correlación entre el radio de curvatura y la velocidad de recorrido, tal como lo evidenció también el bajo valor del coeficiente de Pearson de la Tabla 2
Figura 2. Variabilidad de la velocidad versus la curvatura horizontal
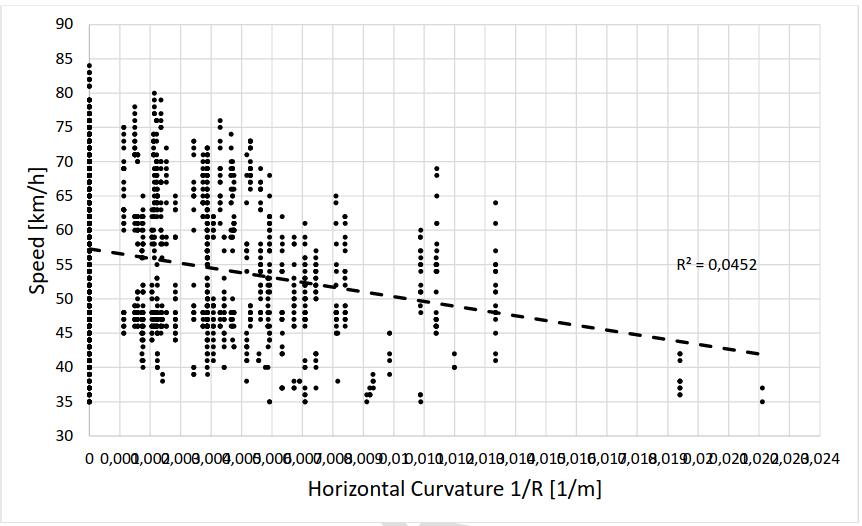
Tabla 2. Los estadísticos resumidos de las variables en la base de datos recolectados
| Variable | Estadístico | 1/R | Velocidad promedio |
| 1/R | Pearson Correlation | 1 | -0.209 |
| Sig. (2-colas) | - | 0 | |
| N | 1934 | 1934 |
En lo que respecta a los datos de Mobileye, la falla del LSS ocurrió cuando el sistema no puede detectar la línea marcada por la pérdida de su rendimiento. El porcentaje general de fallas durante la prueba fue en promedio del 2,12 %. La Figura 3, muestra un valor umbral de radio de curvatura de alrededor de 200 m, por debajo del cual se pudo observar la mayoría de los eventos de error.
Figura 3. Fallas del LSS (valor=1) versus curvatura horizontal
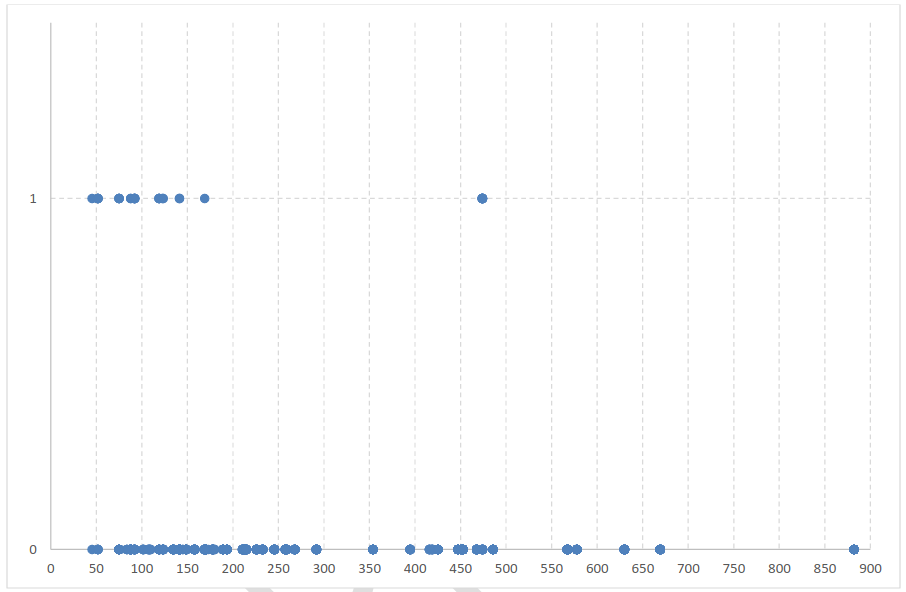
Para radios de curvatura inferiores a 200 m, la probabilidad de falla del LSS se incrementó a 7,8 % contra 0,88 % en secciones con mayor radio (incluyendo tangentes) (Tabla 3).
Tabla 3. Proporción de falla de LSS en dos diferentes clases de curvatura
| Radio | Categoría de falla de LSS | Tamaño muestral (N) | Observado | |
| Fallas de LSS | Proporción | |||
| R <200 m | 1 | 346 | 27 | 7,80% |
| R >200 m | 1 | 1588 | 14 | 0,88% |
Por el contrario, la Figura 4, muestra una propagación de eventos de fallas LSS en un amplio rango de velocidades inferiores a 71 km/h, que caracterizó principalmente las pruebas realizadas en secciones curvas a diferentes velocidades (Figura 2).
Figura 4. Fallas del LSS (valor=1) versus velocidad

Una variable aleatoria binomial como on/off LSS, pudo verse como la suma de un número fijo de ensayos de Bernoulli independientes. La inferencia bayesiana para distribuciones binomiales proporcionó una herramienta útil para estimar los intervalos de confianza de la probabilidad de falla. Por ello, el parámetro de interés fue la probabilidad π de éxito en un número fijo de ensayos que pueden conducir al éxito o al fracaso. Se resaltó que cada ensayo es independiente entre sí y que la probabilidad π sigue siendo la misma en cada ensayo. Para el caso especial de uso de la distribución uniforme estándar como una prioridad no informativa (Beta: α = 1, β = 1), la inferencia bayesiana se realizó determinando la distribución posterior basada en datos observados y construyendo más intervalos creíbles para dibujar directamente inferencia. La Inferencia Bayesiana para distribuciones binomiales mostró una clara diferencia al 95% de nivel significativo entre las dos distribuciones de probabilidad de falla LSS para un radio de curvatura menor o mayor a 200 m (Tabla 4).
Tabla 4. Inferencia bayesiana de una muestra para distribuciones binomiales en dos clases diferentes de curvatura
| Radio | Caracterización de distribución posterior para inferencia binomiala | ||||
| Posterior | 95% de intervalo de confianza | ||||
| Modo | Promedio | Var. | Límite inferior | Límite superior | |
| R <= 200 | 0,078 | 0,080 | 0,0000 | 0,054 | 0,111 |
| R > 200 | 0,009 | 0,009 | 0,0000 | 0,005 | 0,015 |
| a Previo a la proporción binomial: Beta (1, 1) | |||||
Para un radio de curvatura inferior a 200 m y superior a 70 m, la velocidad se distribuyó casi uniformemente en el rango de 35 a 71 km/h con un valor medio de 51 km/h (Figura 2). Para la muestra de 334 secciones, cuando se consideraron dos clases de velocidades con una menor o mayor de 51 km/h (Tabla 5), las distribuciones posteriores de la falla del LSS mostraron iguales probabilidades de error con una clara superposición en los intervalos de confianza (Tabla 6).
Tabla 5. Proporciones de falla LSS en dos clases diferentes de velocidad para 70 m < Radio < 200m
| Velocidad | Categoría de falla de LSS | Tamaño muestral (N) | Observado | |
| Fallas de LSS | Proporción | |||
| V < 51 km/h | 1 | 172 | 11 | 6.40% |
| V > 51 km/h | 1 | 162 | 10 | 6.20% |
Tabla 6. Proporciones de falla LSS en dos clases diferentes de velocidad para 70 m < Radio < 200m
| Velocidad | Caracterización de distribución posterior para inferencia binomiala | ||||
| Posterior | 95% de intervalo de confianza | ||||
| Modo | Promedio | Var. | Límite inferior | Límite superior | |
| V < 51 km/h | 0,064 | 0,069 | 0,000 | 0,036 | 0,111 |
| V > 51 km/h | 0,062 | 0,067 | 0,000 | 0,034 | 0,110 |
| a Previo a la proporción binomial: Beta (1, 1) | |||||
3. Conclusiones
Se realizó un estudio experimental con una recopilación de datos detallados de fallas LSS, en tramos de caminos rurales de dos carriles con diferente radio de curvatura y marcación de carriles en buenas condiciones para la visión humana.
Los factores como la geometría y el ángulo de visión fueron características básicas del algoritmo de procesamiento de imágenes para detectar las marcas de los carriles. Se observó que el radio de la curva horizontal de 200 m fue el umbral para el rendimiento del LSS, lo que aumentó la probabilidad de falla de aproximadamente 1% a alrededor de 8%. Un radio de curvatura de 200 m (velocidad promedio de diseño de 70 km/h) fue una restricción geométrica relevante en la red de carreteras rurales de dos carriles, especialmente en carreteras de montaña donde las curvas con un radio de menos de 200 m son habituales. Por otro lado, la variabilidad de la velocidad en las secciones curvas no mostró efectos significativos para explicar la falla del sistema.
El equipo de Mobileye, que se utilizó en el experimento, posee un sistema basado en visión, otros equipos poseen otros sistemas, con lo que se podría obtener resultados diferentes. A pesar de ello, si diferentes algoritmos de inteligencia artificial y sistemas de cámaras pudieran dar diferentes valores de umbral, el resultado de la investigación identificó la curvatura horizontal como factor de carretera específico que afecta el desempeño del LSS y se debe considerar para definir el procedimiento de prueba de certificación y el dominio de diseño operativo de cada sistema.
Referencias
- SAE international, "Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles" SAE international Vol. J3016, n°J3016, 2018, p. 30
- P. Penmetsa, M. Hudnall, and S. Nambisan, “Potential safety benefits of lane departure prevention technology” IATSS Res. Vol. 43, n° 1, 2019, pp. 21–26
- "Intelligent Transport Systems – Lane departure warning systems – Performance requirements and test procedures", ISO. 2017.
- , "Regulation (EC) No 661/2009 of the European Parliament and of the Council as regards type-approval requirements for the installation of lane departure warning systems in motor vehicles", Commission Regulation (EU),n° 351l 2012. [On line]. Disponible: https://op.europa.eu/en/publication-detail/-/publication/59c0adba-4994-4e24-87a9-3601d888d9f3.[Accedido: 26 Nov- 2019]
- "Road marking materials - Road marking performance for road users and test methods", CEN/TC 226 - ROAD EQUIPMENT, 2018.
- Council of the European Union, Proposal for a Directive of the European Parliament and of the Council amending Directive 2008/96/EC on road infrastructure safety management. Brussels, 2019.
- Austroads, "Infrastructure Changes to Support Automated Vehicles on Rural and Metropolitan Highways and Freeways: Audit Specification (Module 1)", Publication no: AP-T347-19. Sydney: Austroads 2019.
- S. Cafiso, A. Di Graziano, C. D’Agostino, G. Pappalardo, and E. Delfino, “A new perspective in the road asset management with the use of advanced monitoring system & BIM” MATEC Web of Conferences Vol. 231, 2018, p. 01007.
- S. Cafiso, A. Di Graziano, D. G. Goulias, and C. D’Agostino, “Distress and profile data analysis for condition assessment in pavement management systems,” Int. J. Pavement Res. Technol. Vol. 12, n°. 5, pp. 527–536, Sep. 2019.
- Mobileye, “About Us - Mobileye,” 2020. [Online]. Disponible: https://www.mobileye.com/about/. [Accedido 01Sep-2020].
- J. L. Campbell, C. M. Richard, J. L. Brown, M. G. Lichty, J. Graham, and M. O’Laughlin, “NCHRP Report 600C – Human Factors Guidelines for Road Systems,” Washington, 2010.