Evaluación del modelo digital de terreno obtenido mediante técnicas de fotogrametría con VANT y con técnicas GNSS aplicados a proyectos viales en zonas de mediana vegetación
Assessment of the Digital Terrain Model Obtained by Photogrammetry Techniques with UAV and GNSS Techniques Applied to Road Projects in Medium Vegetation Areas
Artículos
Recibido: 15/08/2020
Aprobado: 27/10/2020
Autores
Lalangui Jaramillo Yandri José
Zárate Torres Belizario amador
Resumen
El objetivo de la investigación de tipo cuantitativo fue obtener un modelo digital de superficie en caminos de montaña mediante un vehículo aéreo no tripulado (VANT). Se planificó que en la zona de estudio existiera vegetación mediana. Así, a una altura de 100 m, un VANT tomó imágenes con un periodo aproximado de 2 s. Estas se procesaron con un software que se basa en el algoritmo SfM, el cual permite plasmar varias fotografías en un modelo digital de terreno. Además, en busca de cumplir con el objetivo, se configuró un modelo digital de terreno mediante técnicas de fotogrametría y se contrastaron los resultados con el modelo digital de terreno derivado de técnica GPS diferencial. Se evidenció que los modelos digitales son similares, porque existe variación donde la vegetación es densa, y que servirán para reducir el margen entre estos dos tipos de levantamiento y, de este modo, lograr levantamientos topográficos de manera oportuna y sin coste al medio ambiente
Abstract
The objective of this research was to obtain a digital surface model on mountain roads using an unmanned aerial vehicle. The research is quantitative. The study area was planned, where there is a presence of medium vegetation. The results were obtained with the unmanned aerial vehicle at a height of 100m, taking images with an approximate period of 2s. The processing was done with the help of software that is based on the Software rom Motion approach, which allows several photographs to be captured in a digital terrain model. Fulfilling the objective of this research, the digital terrain model was obtained using photogrammetry techniques and the results were compared with the digital terrain model derived from the Differential GPS technique. Thus, the digital models are similar, with a variation where the vegetation is dense. The obtained models will serve to reduce the margin between these two types of surveys and in this way obtain topographic surveys promptly and without cost to the environment
Introducción
En la actualidad existen diferentes métodos con los cuales llevar a cabo levantamientos topográficos [1], como los levantamientos topográficos logrados mediante estación total, o técnicas tipo Global Navigation Satellite System (GNSS), los cuales se innovan tecnológicamente de forma constante con el fin de obtener con gran facilidad y velocidad las posiciones en el terreno [2]. La mayoría de ellos difieren de la precisión, más aún en los levantamientos donde existe vegetación, lo que podría repercutir en el medio ambiente, sobre todo en las etapas de prefactibilidad, cuando el diseño todavía no es el definitivo. Las obras de carreteras deben insertarse en el medio ambiente con el menor coste ecológico, lo que supone la incorporación de la variable medioambiental en la toma de decisiones sobre los proyectos [3].
Hoy en día, las nuevas tecnologías son amigables con el medio ambiente, como son los levantamientos topográficos con el uso de los vehículos aéreos no tripulados (VANT), los receptores GNSS de doble frecuencia, entre otros. En la última década, una serie de nuevas técnicas de teledetección ha dado lugar a un aumento drástico en el campo de la información, al proporcionar nuevas oportunidades para una mejor comprensión de la superficie de la Tierra [4]. El avance topográfico, especialmente con los receptores GNSS de doble frecuencia, ha crecido de manera enorme, ya que con estos se procuran datos precisos a través de procedimientos denominados GPS diferencial, que incluyen el uso simultáneo de dos o más receptores basados en código [5]. En este contexto, un receptor ocupa un punto denominado estación base, del cual se conocen las coordenadas precisas, y otro receptor, denominado rover, ocupa las estaciones de interés, pero sus coordenadas se desconocen [5]. Cada vez es más común ver a topógrafos que apoyan sus informes en ortofotos, mapas de elevación, nubes de puntos y curvas de nivel capturadas con VANT y cámaras de alta resolución [6], porque permiten levantamientos con un margen de error permisible para estudios preliminares.
Además, la obtención de levantamientos topográficos mediante técnicas de fotogrametría era bastante complicado, por varias limitaciones: rendimiento limitado, baja resolución en ciertas situaciones y alto costo [7]. Además, hay momentos en los que es difícil lograr imágenes de alta resolución a través de un satélite, porque a medida que aumenta la cobertura, disminuye el detalle de las imágenes [7]. Hoy en día, los VANT permiten levantamientos confiables en el menor tiempo posible, utilizando los enfoques del algoritmo Structure for Motion (SfM), que facilitan enormemente la producción de modelos topográficos precisos a partir de fotografías recopiladas con VANT [8]. De esta manera, mejora el rendimiento en los proyectos y se tiene una idea más clara de la realidad con la generación de ortofotos actualizadas. Así, el uso de los VANT reducirá el impacto ambiental y se logrará el mejor trazado posible [3].
El ahorro de tiempo y el beneficio al medio ambiente que prestan este tipo de levantamientos son de importancia para el desarrollo de los proyectos; no obstante, aún no se han realizado investigaciones para obtener topografías en caminos de montaña. Por tal motivo, el objetivo de esta investigación fue analizar y comparar los levantamientos topográficos mediante técnicas GNSS y los levantamientos mediante VANT en zonas con vegetación media. Con esta comparación se espera que tanto profesionales como topógrafos consigan los mejores parámetros para el procesamiento de las imágenes con VANT.
Para cumplir con el objetivo de esta investigación, primero, se revisó la literatura relacionada con las técnicas GNSS y con técnicas VANT. Después, se realizó el levantamiento topográfico empleando las dos técnicas y, luego, se procedió a calcular la precisión de cada uno de ellas, para poder aplicar diferentes tipos de filtros en el momento de procesar la información. Una vez obtenidos los resultados, se compararon las precisiones de los dos métodos.
El resto del articulo está organizado de la siguiente manera: en la introducción se recopiló el estado del arte de todo lo referente a técnicas de fotogrametría y levantamientos mediante sistemas GNSS. En la sección 1 se describen los materiales y métodos, así como las variables que se tomaron en cuenta en el momento de procesar cada uno de los levantamientos. En la sección 2 se presentan los resultados alcanzados en la fase de campo y oficina. En la sección 3 se efectúa la discusión sobre los datos obtenidos. Finalmente, en la última sección se concluye.
1. Materiales y métodos
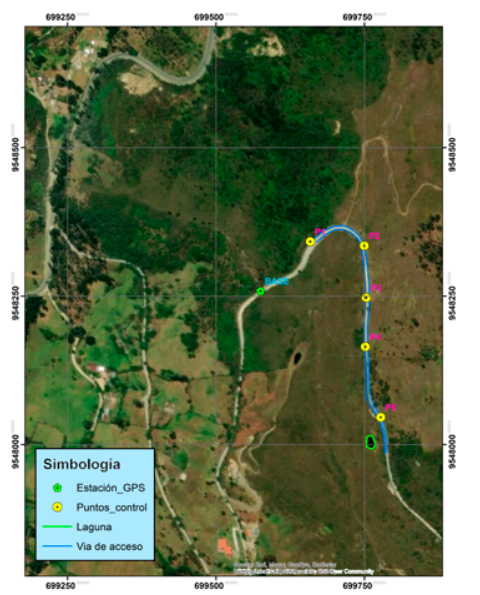
El área de estudio (figura 1) se encuentra ubicada al sur de la ciudad de Loja, en el sector Cajanuma, en la vía de acceso al refugio del Parque Nacional Podocarpus, donde se presenta una zona topográfica montañosa y una vegetación de mediana altura (matorrales). La altura media del área de estudio es de 2492 m s. n. m.
Figura 1. Área de estudio en la vía al refugio del Parque Nacional Podocarpus
1.1 Aplicación de la técnica
El área de estudio (figura 1) se encuentra ubicada al sur de la ciudad de Loja, en el sector Cajanuma, en la vía de acceso al refugio del Parque Nacional Podocarpus, donde se presenta una zona topográfica montañosa y una vegetación de mediana altura (matorrales). La altura media del área de estudio es de 2492 m s. n. m.
Figura 2. Dron Mavic Pro 1

Para establecer la estación base, los puntos de control y la ejecución del levantamiento topográfico se emplearon dos receptores GNSS marca Trimble modelo R4 (figura 3), que permiten precisiones en modo estático de 3 mm + 0,1 ppm en horizontal y 3,5 mm + 0,4 ppm en vertical (ppm: partes por millón).
Figura 3. Receptor GNSS Trimble modelo R4

La estación base en el área de estudio se estableció mediante la técnica fast static con un tiempo de ocupación de 1 h. Entre tanto, las coordenadas de los puntos de control y el levantamiento topográfico se determinaron con la técnica RTK (Real Time Kinematic) [8], con un tiempo de registro de 1 s, con una máscara de elevación de 10°. Durante la fase del levantamiento del terreno se tomaron todos los puntos relevantes de su morfología para representarlo lo más real posible y que generara el modelo digital del terreno (MDT).
1.2 Procesamiento de datos
Las coordenadas de la estación base se establecieron utilizando la estación de referencia UTPL-GNSS de la Universidad Técnica Particular de Loja. El posproceso se efectuó mediante el software Trimble Business Centre, versión 3.40. El marco de referencia empleado es un UTM, WGS-84 zona 17S.
En la georreferenciación de ortofotos y el MDT se emplearon 6 puntos de control para mejorar la precisión y geolocalización exacta de los pixeles que forman la imagen [9], distribuidos en el área de estudio y consistentes en marcas de fondo blanco en cuyo centro se halla una cruz de color rojo de fácil reconocimiento desde el aire, tal como se muestra en la figura 4.
Figura 4. Detalle de las marcas del punto de control

Las coordenadas de los puntos, tanto de la estación base como la de los puntos de control se pueden observar en la tabla 1.
Tabla 1. Coordenadas de la estación base y los puntos de control
| Estación | Norte | Este | elevación |
| Base | 9548259,048 | 699574,990 | 699574,990 |
| Pc-1 | 9548341,957 | 699658,616 | 2487,555 |
| Pc-2 | 9548334,884 | 699749,504 | 2486,267 |
| Pc-3 | 9548247,352 | 699752,835 | 2488,451 |
| Pc-4 | 9548164,777 | 699751,419 | 2491,866 |
| Pc-5 | 9548046,180 | 699777,307 | 2499,796 |
La planificación del vuelo utilizó la aplicación DroneDeploy, tomando en cuenta un traslape longitudinal y transversal de 70 % y una velocidad horizontal de 10 m/s. Por tratarse de una zona montañosa y para cubrir el área de estudio, se efectuaron dos vuelos, el primero a una altura de 60 m y el segundo a una altura de 100 m.
Para el procesamiento de las imágenes y la generación de ortofotos y MDT obtenidas del VANT se empleó el software Agisoft Photoscan, versión 1.4.3, que se basa en el algoritmo SfM, y que consiste en crear una nube de puntos, realizar el ajuste mediante puntos de control, generar la malla y textura y, finalmente, la generación de ortofotos y MDT.
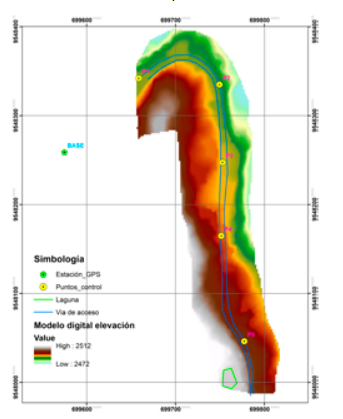
El MDT derivado del levantamiento con técnicas VANT se procesó teniendo en cuenta la orientación de las fotografías y la nube de puntos densa a la cual se aplicó la herramienta de filtrado de Agisoft Photoscan para eliminar la vegetación. Esta consiste en clasificar los puntos del terreno en diferentes categorías, como puntos de terreno, vegetación baja, vegetación mediana, vegetación alta, firme de carretera u objetos hechos por el hombre [9], con el objetivo de generar el MDT a partir del modelo digital de superficie, utilizando solamente los puntos de terreno y firme de carretera. En la figura 5 se muestran los rangos de altura asociados al modelo digital de elevación, los cuales se obtuvieron al aplicar técnicas de fotogrametría.
Figura 5. Modelo digital de elevación obtenido mediante el método VANT
La planificación del vuelo utilizó la aplicación DroneDeploy, tomany MDT obtenidas del VANT se empleó el software Agisoft Photoscan, versión 1.4.3, que se basa en el algoritmo SfM, y que consiste en crear una nube de puntos, realizar el ajuste mediante puntos de control, generar la malla y textura y, finalmente, la generación de ortofotos y MDT.
El MDT derivado del levantamiento con técnicas VANT se procesó tendo en cuenta un traslape longitudinal y transversal de 70 % y una velocidad horizontal de 10 m/s. Por tratarse de una zona montañosa y para cubrir el área de estudio, se efectuaron dos vuelos, el primero a una altura de 60 m y el segundo a una altura de 100 m.
Para el procesamiento de las imágenes y la generación de ortofotos iendo en cuenta la orientación de las fotografías y la nube de puntos densa a la cual se aplicó la herramienta de filtrado de Agisoft Photoscan para eliminar la vegetación. Esta consiste en clasificar los puntos del terreno en diferentes categorías, como puntos de terreno, vegetación baja, vegetación mediana, vegetación alta, firme de carretera u objetos hechos por el hombre [9], con el objetivo de generar el MDT a partir del modelo digital de superficie, utilizando solamente los puntos de terreno y firme de carretera. En la figura 5 se muestran los rangos de altura asociados al modelo digital de elevación, los cuales se obtuvieron al aplicar técnicas de fotogrametría.
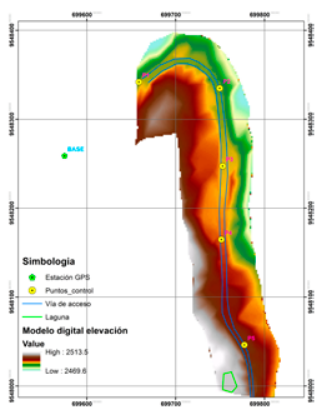
Figura 6. Modelo digital de elevación obtenido mediante técnicas GNSS
2. resultados
Una vez que hechos los levantamientos topográficos con las dos metodologías, se procedió a calcular su precisión.
El MDT derivado del levantamiento con técnicas VANT se procesó con el software Agisoft Photoscan, versión 1.4.3, mediante el cual se lograron trabajar las 220 imágenes obtenidas en el vuelo. Ello dio como resultado una nube de puntos densa de 18 163 067 puntos. Para mejorar la precisión del procesamiento se utilizaron 5 puntos de control, de los cuales se obtuvo un error medio cuadrático (RMSE) de 3,401 cm, tal como se observa en la tabla 2.
Tabla 2. Error cuadrático medio (RMSE) de los puntos de apoyo
| Nombre | Error en X (cm) | Error en Y (cm) | Error en Z (cm) | Error en XY (cm) |
| Base | 0,65587 | −0,07754 | −1,43950 | 1,58377 |
| Pc-1 | −0,01443 | −0,16376 | 0,59357 | 0,61592 |
| Pc-2 | 1,90150 | −0,80635 | 0,85048 | 2,23366 |
| Pc-3 | −2,06997 | −1,69759 | 0,51571 | 2,72627 |
| Pc-4 | −4,94446 | −0,32467 | −0,15622 | 4,95757 |
| Pc-5 | 4,46821 | 3,07043 | −0,36558 | 5,43379 |
| Total | 2,96489 | 1,47749 | 0,77156 | 3,40130 |
| RMSE de puntos de apoyo | ||||
| Número | Error X | Error Y | Error Z | Error XY |
| 6 | 2,9649 | 1,4775 | 0,7716 | 3,3126 |
| Total (cm) | 3,4013 | |||
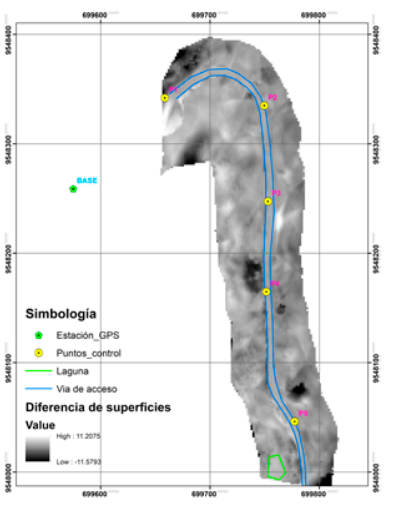
Con los resultados, se compararon los modelos de elevación mediante una diferencia de imágenes ráster con la ayuda del software ArcGIS, versión 10.1.5, tal como se muestra en la figura 7.
Figura 7. Modelo digital de elevación obtenido mediante técnicas GNSS
3. Discusión
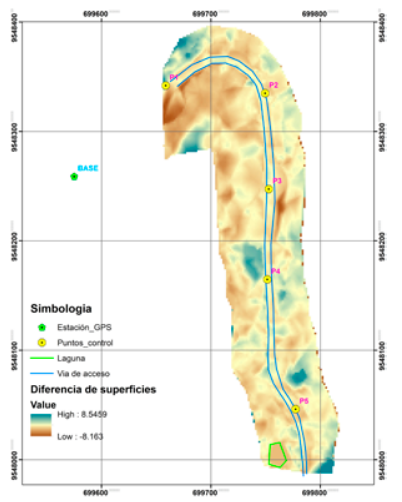
Mediante la obtención del MDT derivado de técnicas GNSS y el MDT derivado de técnicas de fotogrametría, se observó que ambos modelos son similares; sin embargo, en lugares donde existen áreas con una vegetación densa, la herramienta de filtrado de vegetación de Agisoft Photoscan no la elimina en su totalidad [10]; por eso, en estos sectores con presencia de vegetación densa las diferencias se encuentran entre 1,00 m y 4,5 m.
En cambio, en la mayor parte de la zona que es de vegetación baja, los valores oscilan entre 0,25 y 0,90 m. De la misma manera se han evaluado las alturas en cada uno de los puntos de control y la diferencia no ha sido mayor de 10 cm, inclusive en el punto de control 4 el error ha sido de 0,00 cm. Tanto el modelo VANT como el modelo GNSS son similares; difieren en los lugares con vegetación alta.
El MDT obtenido mediante VANT ha sido procesado con la ayuda de 5 puntos de control. El rango de alturas de este modelo digital se encuentra entre los 2472,00 y los 2512,00 m s. n. m. En cambio, el modelo digital de elevación con técnicas GNSS se lo ha realizado con la ayuda de una estación Base en modo RTK, para levantar los puntos de terreno. El rango de alturas de este modelo digital se encuentra entre 2469,60 y 2513,50 m s. n. m. Así, se puede evidenciar una diferencia significativa, esto especialmente en los bordes del modelo generado por técnicas de fotogrametría.
En comparación con otras investigaciones, en las que utilizaron 14 puntos de control y altura de vuelo de 50 m, se obtuvieron precisiones máximas de 0,5 cm, y un RMSE de 0,57 m [11], que es un valor superior al alcanzado en esta investigación, cuyo valor de RMSE fue de 3,40 cm. Para lograr un MDT de buena calidad fue necesario usar la herramienta de filtrado de Agisoft Photoscan, a efectos de eliminar la vegetación. Inicialmente, se lograron orientar las fotografías conseguidas mediante VANT, y se les añadieron los puntos de control para optimizar las cámaras y de esta manera obtener la nube de puntos densa a la cual se aplicaron filtros, como el ángulo máximo de 15° y la distancia máxima de 1 m, para poderlos clasificar.
En la figura 8 se muestra la imagen ráster lograda de realizar la diferencia entre los modelos digitales de elevación.
Figura 8. Modelo digital de elevación obtenido de la diferencia entre los modelos de elevación GNSS y VANT
Conclusiones
Al evaluar las diferentes metodologías para el levantamiento topográfico en caminos de montaña, se lograron identificar varias ventajas de obtener el MDT mediante la técnica VANT, entre ellas el tiempo del levantamiento topográfico, que es mucho menor que el levantamiento topográfico con GPS diferencial.
El MDT logrado mediante la técnica de fotogrametría presenta un mejor detalle que el alcanzado con técnicas GNSS, excepto en los lugares donde existe presencia de vegetación densa, cuya precisión varía respecto al terreno. De la misma manera, los rangos de elevación entre los métodos analizados varían 2 m aproximadamente a nivel general del levantamiento. En el levantamiento con VANT, la precisión depende mucho de la vegetación del sector, y se comprueba que en zonas donde la vegetación es muy densa, la precisión está en el rango de 1,00 a 4,50 m; en cambio, en zonas donde la vegetación es baja o nula, esa precisión aumenta hasta llegar a los 25,00 cm. La precisión aumenta considerablemente al utilizar puntos de control colocados mediante técnica GNSS.
Al analizar las dos metodologías, se concluye que el levantamiento con VANT es bastante preciso en zonas con baja vegetación; además, permite un MDT de gran calidad, al incorporar puntos de control, los cuales se deben colocar en zonas completamente visibles para mejorar la precisión del modelo.
Referencias
- R. Pachas, “El levantamiento topográfico: uso del GPS y estación total”, vol. VIII, n.º 16, pp. 29-45, 2009 [en línea]. Disponible: http://www.saber.ula.ve/bitstream/handle/123456789/30397/articulo3.pdf?sequence=1&isAllowed=y
- E. Rojas Suca y F. Rojas Suca, “Grado de precisión en el diseño geométrico de una carretera, utilizando modelo digital de terreno de Google Earth y GPS diferencial”, tesis de grado, Universidad Andina “Néstor Cáceres Velásquez”, Ecuador, 2015 [en línea]. Disponible: http://repositorio.uancv.edu.pe/handle/UANCV/489
- B. García y L. Bañón, Manual de carreteras. Vol. I: Elementos y proyecto. Alicante: Universidad de Alicante, 2000.
- P. Tarolli, “High-resolution topography for understanding Earth surface processes: opportunities and challenges”, Geomorphology, vol. 216, pp. 295-312, 2014. https://doi.org/10.1016/j.geomorph.2014.03.008
- B. Zárate-Torres, “Monitoreo de movimientos de ladera en el sector de San Pedro de Vilcabamba mediante procedimientos GPS”, MASKANA, vol. 2, n.º 2, pp. 17-25, 2011. https://doi.org/10.18537/mskn.02.02.02
- A. Insights, “Topografía con drones: qué es y cómo realizarla”, 2019 [en línea]. Disponible: https://www.aerial-insights.co/blog/topografia-con-drones/
- M. Anguiano-Morales, L. F. Corral-Martínez, G. Trujillo-Schiaffino, D. P. Salas-Peimbert y A. E. García-Guevara, “Topographic investigation from a low altitude unmanned aerial vehicle”, Opt. Lasers Eng., vol. 110, pp. 63-71, 2018. https://doi.org/10.1016/j.optlaseng.2018.05.015
- M. R. James, S. Robson, S. D’Oleire-Oltmanns y U. Niethammer, “Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment”, Geomorphology, vol. 280, pp. 51-66, 2017. https://doi.org/10.1016/j.geomorph.2016.11.021
- C. J. Puerta, “Integración de los datos o obtenidos con dron en el SIG del Parc Natural de la Serra de Collserola”, tesis de maestría, Universidad Autónoma de Barcelona, España, 2019 [en línea]. Disponible: https://ddd.uab.cat/record/214382
- G. Costales, “Análisis comparativo entre los software de prueba Agisoft Photoscan y Pix4D para el procesamiento de datos obtenidos con fotogrametría de vehículo aéreo no tripulado (UAV) de bajo costo aplicado a proyectos de medio ambiente”, tesis de pregrado, Escuela Politécnica Nacional, Ecuadro, 2018 [en línea]. Disponible: https://bibdigital.epn.edu.ec/handle/15000/19825
- E. Akturk y A. O. Altunel, “Accuracy assesment of a low-cost UAV derived digital elevation model (DEM) in a highly broken and vegetated terrain”, Meas. J. Int. Meas. Confed., vol. 136, pp. 382-386, Mar. 2019. https://doi.org/10.1016/j.measurement.2018.12.101