Empleo de VANT para determinar fallas superficiales en pavimentos flexibles
Use of UAV for the Determination of Surface Faults in Flexible Pavements
Artículos
Recibido: 13/09/2020
Aprobado: 22/10/2020
Autores
Peña Sotomayor María Paula
Zárate Torres Belizario amador
Resumen
El objetivo de este estudio fue evaluar las fallas superficiales presentes en un pavimento flexible de aproximadamente 500 m de longitud mediante el uso de VANT y demostrar la capacidad de las imágenes capturadas. La investigación es de tipo aplicada tecnológica y el enfoque que se utilizó fue cuantitativo. La metodología se centró en tres etapas: inicialmente, la planificación de la zona de estudio, luego la recolección y procesamiento de datos, para culminar con el análisis de resultados. La muestra de estudio fue aleatoria, con 13 tipos de baches y fisuras sobre el pavimento. Los datos se obtuvieron a una elevación de 40 m capturando imágenes cada 2 s. El procesamiento se hizo a través de un software fotogramétrico basado en el algoritmo SfM. Como resultado, se aprecia que la diferencia entre las mediciones visuales y las obtenidas por SIG oscila entre 0,17 y 5 cm. La desviación estándar del conjunto de muestras fue de 2,32 cm. Se demostró la capacidad de la imagen capturada con VANT para la extracción de distintas fallas superficiales. Este sistema proporciona una medición detallada y precisa de la ruta de la carretera y de la geometría del bache, y, por lo tanto, mejora la eficiencia del monitoreo del estado de la carretera.
Abstract
The objective of this study is to evaluate the surface faults present in a flexible pavement of approximately 500 m length through the use of UAV and to demonstrate the capacity of the images captured with it. This is an applied technological research and the quantitative approach was usedfor its development. The methodology focused on three stages, planning the study area, data collection and processing, and analysis of results. The sample was random, with 13 types of potholes and fissures. Data were obtained at an elevation of 40 meters high, capturing images every 2 seconds. The processing was done through photogrammetric software based on the SfM (Structure from Motion) algorithm. As a result, it is observed that the difference between measurements ranges from 0.17 to 5 cm. The standard deviation of the set of samples was 2.32 cm. The ability of UAV imaging for surface fault extraction was demonstrated. This system provides precise measurements of deterioration geometry, which allows the improvement of road condition monitoring
Introducción
Las fallas superficiales que se presentan en los pavimentos, sean estos flexibles o rígidos, se originan principalmente por un debilitamiento de su estructura, ya sea por factores climáticos, esfuerzos o por deficiencia en los materiales empleados. Si no se lleva a cabo un mantenimiento periódico de las vías, estas fallas constituyen un riesgo para la circulación de los vehículos, por los daños mecánicos que se generan, así como por la generación de accidentes de tránsito [1], [2]. Esto hace que sea necesaria una evaluación del estado de la superficie del pavimento con mediciones fiables y de buena calidad para su posterior mantenimiento. La entidad rectora del Sistema Nacional del Transporte Multimodal en Ecuador es el Ministerio de Transporte y Obras Públicas (MTOP), encargado de formular e implementar políticas y proyectos que garanticen una red de transporte seguro y competitivo. Su alcance llega a la Red Vial Estatal, integrada por vías primarias y secundarias. Las vías terciarias y caminos vecinales están a cargo del Gobierno Provincial de la zona [3]. Ambas entidades brindan mantenimiento a todas las carreteras del país, y con ello contribuyen al desarrollo social y económico.
Para ello, asignan a una persona el monitoreo de la condición de cada carretera [4]; sin embargo, se presentan varios inconvenientes en el momento de adquirir información sobre la zona que se encuentre en mal estado. No se puede predecir el lugar ni el momento de la formación del deterioro [5]. Además, el tiempo de detección es alto, debido a obstáculos, malas ubicaciones por parte del informante, etc., por lo que se han empezado a buscar otras opciones que optimicen los procesos.
Existen investigaciones para detectar fallas superficiales con métodos basados en la reconstrucción 3D del pavimento [6]. También el empleo de escaneo láser 3D y estereovisión [7]; pero son costosos y requieren mucho esfuerzo computacional. Por tal razón, se necesita un método adicional para evaluar el estado de la carretera, que proporcione detalladamente la profundidad, el área, el perímetro y el volumen del deterioro [2]. Así, el equipo de mantenimiento puede acudir al lugar con la cantidad de mezcla asfáltica necesaria, evitando excesos o falta de material. Actualmente, en la identificación de baches se están usando vehículos aéreos no tripulados (VANT) [5], que están dando resultados precisos, económicos y de fácil acceso, porque la medición real en campo se valida al comparar las imágenes adquiridas por el VANT.
Debido a esos motivos, el trabajo de investigación buscó identificar las fallas superficiales de un tramo de pavimento mediante el uso de VANT, con el fin de demostrar la capacidad de las imágenes capturadas con este. Los VANT se refieren a una clase de aviones que pueden volar sin la presencia del piloto, capaces de mantener una altura de vuelo controlado por medio de su función autónoma [8]. Actualmente, son más las aplicaciones de los drones en la ingeniería civil frente a las aeronaves pilotadas y convencionales, satélites, etc. [9]-[11], especialmente por su bajo costo, flexibilidad operacional [12], acceso a lugares restringidos y alta calidad y rapidez en la obtención de datos [13].
En la introducción se registraron las características de distintos baches, seleccionados aleatoriamente, por medio de VANT y por medio de una medición convencional directa en el sitio. Con ello se estableció una comparativa de precisión entre ellos.
En la siguiente sección se habla sobre los materiales y métodos, donde se pueden ver las características del dron y la cámara que se emplearon en el monitoreo para en la segunda sección discutir los resultados obtenidos con los modelos digitales de las imágenes que se adquirieron con el dron y, finalmente, concluir y recomendar.
1. Materiales y métodos
1.1. Zona de estudio
El área de estudio está conformada por una longitud aproximadamente de 500 m. Se encuentra en la vía antigua Loja-Catamayo, de pavimento flexible (figura 1). Superficialmente, se pueden apreciar varias tipologías de fallas, entre las que se destacan grietas y baches (figura 2).
Figura 1. Ubicación zona de estudio
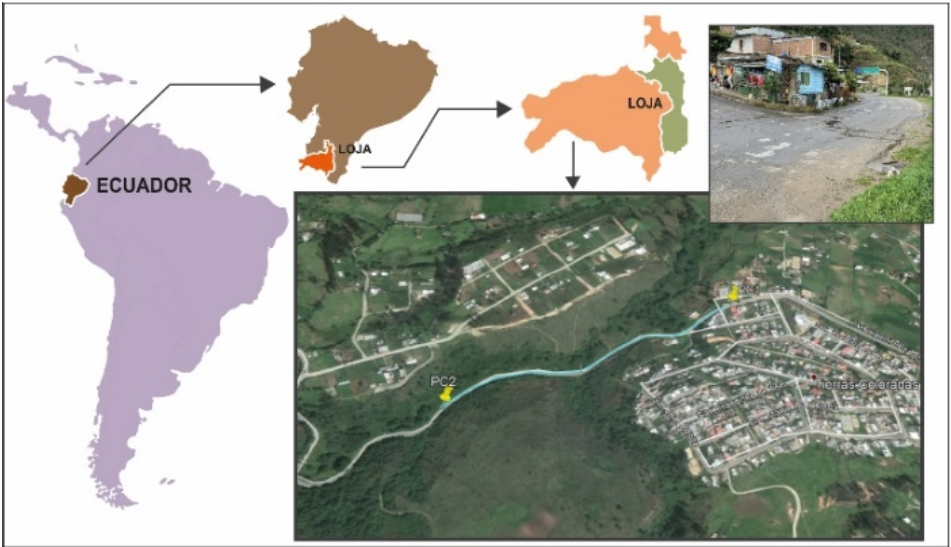
Figura 2. Ejemplos de deterioro detectados en el área de estudio

1.2. Obtención de imágenes con VANT
Para la obtención de las imágenes con VANT de la zona de estudio se empleó un dron MAVIC Pro 1, perteneciente a la casa fabricante DJI (figura 3). Este equipo posee una autonomía de vuelo de 27 min con un alcance máximo de vuelo de 13 km, gracias a su batería LiPO 3S de 3830 mA y un voltaje de 11,4 V. La velocidad máxima es de 65 km/h y tiene una velocidad de descenso de 3 m/s. En su parte frontal posee una cámara de 12,35 Mpx y distancia focal f/2,2 (28 mm en formato equivalente a 35 mm) y provista de un sistema de estabilización que le permite realizar tomas en ángulos de −90° a +30° [14].
Figura 3. DJI MAVIC PRO 1, provisto de cámara frontal

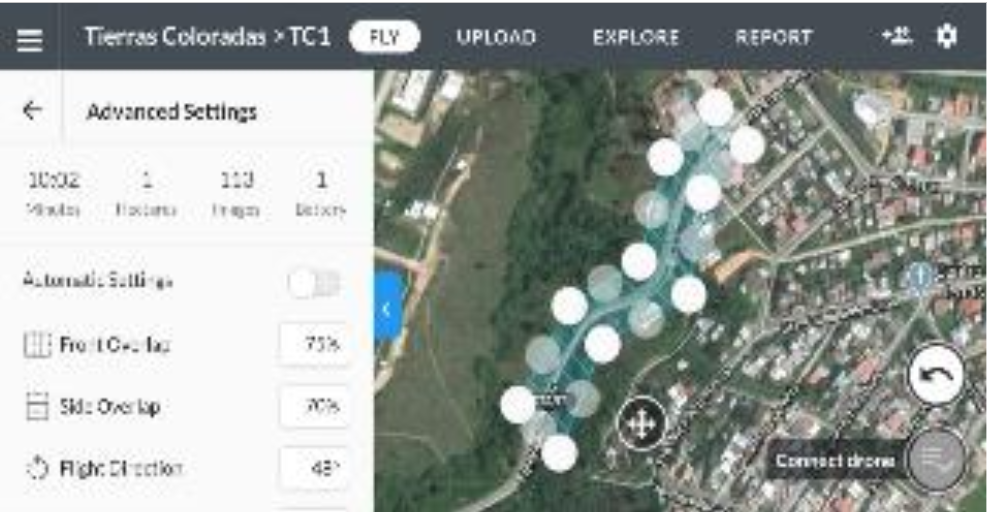
La ruta de vuelo se planificó con la aplicación DroneDeploy. Para ello, se empleó una altura de vuelo de 40 m, una velocidad horizontal de 2 m/s, un traslape longitudinal de 75 % y uno transversal de 70 %. El intervalo de captura de imágenes fue de 2 s. La dirección de la línea de vuelo se estableció en 48° (figura 4).
Figura 4. Plan de vuelo desarrollado en la aplicación DroneDeploy
Para la orientación de los productos fotogramétricos (ortofotos y MDS) se utilizaron 6 puntos de control, distribuidos en la zona de estudio. Consistieron en marcas fotogramétricas cuyas posiciones se determinaron mediante procedimientos geodésicos. Las coordenadas de estos puntos se establecieron con el equipo GNSS doble frecuencia Trimble R4, modelo 3. El modo de trabajo empleado para calcular las posiciones fue fast static con un tiempo de ocupación de 120 min. Los datos GNSS se ajustaron tomando como datos de referencia los generados por la estación GNSS LJEC de la red Sirgas del Instituto Geográfico Militar. El software usado para el posproceso fue el Trimble Business Center, versión 4.0.
Las imágenes colectadas con el VANT se procesaron en el software Agisoft Photoscan, versión 1.4.5, el cual, basándose en los algoritmos SfM (Structure from Motion), permite procesos como: alineación de las ortofotos, creación de nube de puntos, generación de la malla, así como exportación de ortofotos y MDS [15].
Para el análisis de los modelos obtenidos se empleó el software ArcGIS, versión 10.1. El marco de referencia empleado es UTM WGS-84, zona 17 S.
2. Resultados y análisis
Con las 247 imágenes obtenidas con el VANT se obtuvo una nube de puntos densa de 87, 371 y 413 puntos de alta calidad.
La tabla 1 muestra los errores en cada uno de los puntos de control empleados para orientar las ortofotos. Estos errores permiten medir el grado de ajuste de dichos puntos [16]. Así, se obtuvo un error medio cuadrático en XY de 0,02287 m.
Tabla 1. Error obtenido con base en los puntos de control
| P | X error (cm | Y error (cm) | Z error (cm) | ERROR (cm) |
| PI | 0,2905 | 0,3981 | −0,0028 | 0,4929 |
| P2 | −1,1148 | −0,4861 | −0,0109 | 1,2162 |
| P3 | 1,1288 | −1,1101 | 0,1659 | 1,5919 |
| P4 | −0,0225 | 3,3673 | −0,1026 | 3,3689 |
| P5 | 0,9508 | −3,4364 | 0,2407 | 3,5737 |
| P6 | −1,2249 | 1,2743 | −0,0680 | 1,7689 |
| X error (cm) | Y error (cm) | Z error (cm) | XY error (cm) | |
| RMSE | 0,9134 | 2,0976 | 0,1296 | 2,2878 |
| Total (cm) | 2,2915 |
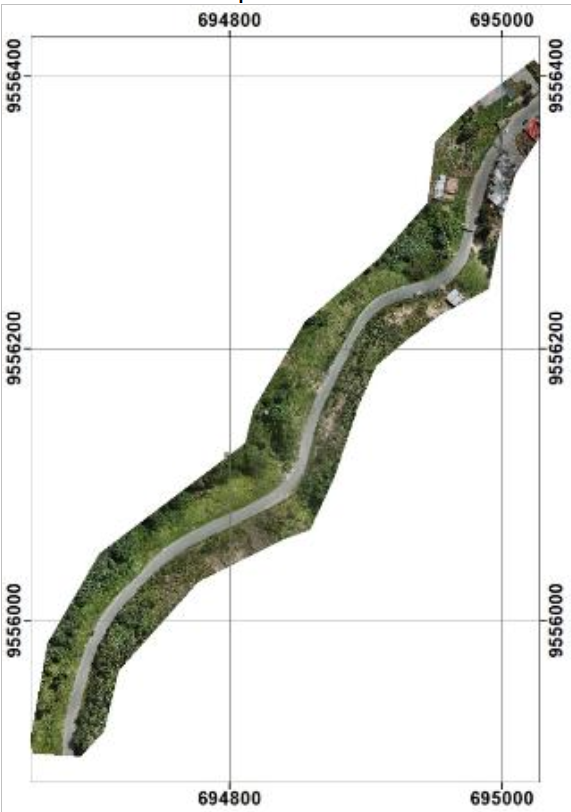
En la figura 5 se muestra la ortofoto de la zona estudio. La resolución obtenida es de 1,29 cm/px y una densidad de puntos de 0,149 puntos/cm2.
Figura 5. Ortofoto (Escala 1:2000)
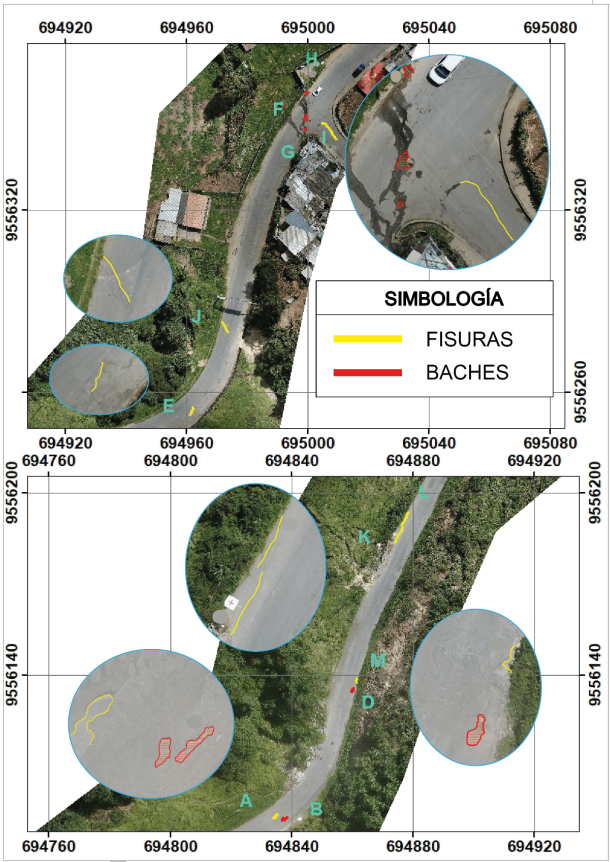
En la figura 6 se presentan las 13 muestras aleatorias de fallas presentadas en la superficie del pavimento, entre las que se destacan grietas y baches y a las cuales se realizó la medida de su longitud y ancho.
Figura 6. Ubicación de muestras de deterioro en el tramo de estudio (escala 1:1100)
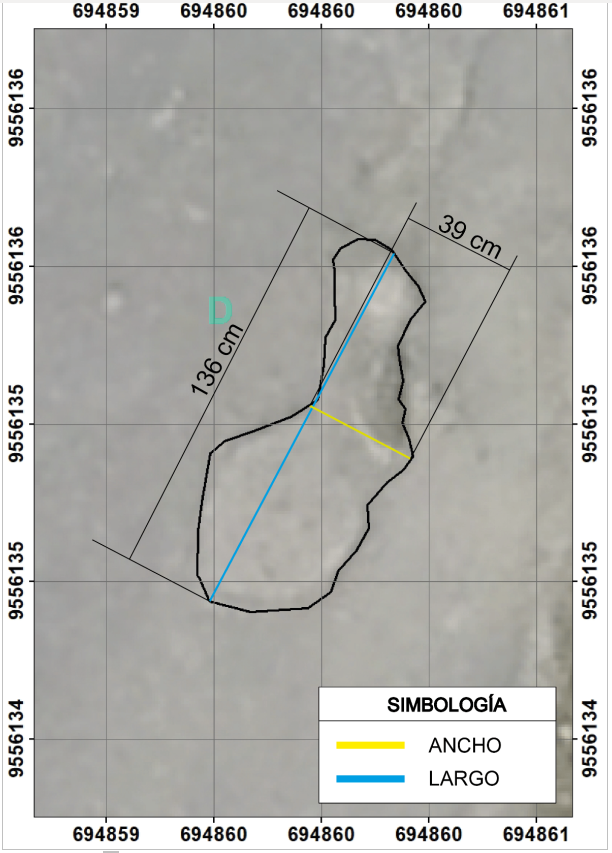
En la figura 7 se muestra un ejemplo de medición sobre un bache empleando para ello ArcGIS, versión 10.1. Esto permitió establecer una diferencia entre las medidas registradas en campo como las efectuadas en ArcGIS, como se muestran en la tabla 2.
Figura 7. Ejemplo de medición en ArcGIS (deterioro “D”. Escala 1:10)
La ruta de vuelo se planificó con la aplicación DroneDeploy. Para ello, se empleó una altura de vuelo de 40 m, una velocidad horizontal de 2 m/s, un traslape longitudinal de 75 % y uno transversal de 70 %. El intervalo de captura de imágenes fue de 2 s. La dirección de la línea de vuelo se estableció en 48° (figura 4).
Tabla 2. Comparación entre longitud real y SIG
| Método convencional | ArcGIS (SIG) | Diferencia en medición | ||||
| Ref. | Largo (cm) | Ancho (cm) | Largo (cm) | Ancho (cm) | Largo (cm) | Ancho (cm) |
| A | 173 | 47 | 169 | 46,7 | 4,0 | 0,3 |
| B | 153 | 29 | 150 | 28,5 | 3,0 | 0,5 |
| C | 46 | 43 | 47 | 44,0 | −1,0 | −1,0 |
| D | 140 | 40 | 136 | 39,0 | 4,0 | 1,0 |
| E | 275 | - | 270 | - | 5,0 - | |
| F | 160 | 86 | 159 | 85,4 | 1,0 | 0,7 |
| G | 64 | 45 | 61,2 | 43,0 | 2,8 | 2,0 |
| H | 88 | 84 | 86,9 | 84,4 | 1,1 | −0,2 |
| I | 759 | - | 763 | - | −4,0 | - |
| J | 400 | - | 404 | - | −4,0 | - |
| K | 583 | - | 584 | - | −1,0 | - |
| L | 474 | - | 476 | - | −2,0 | - |
| M | 109 | - | 104 | - | 5,0 | - |
| Desviación estándar (cm) | 2,32 | |||||
3. Discusión
Los ajustes del modelo obtenido mediante VANT sugieren valores de precisión definidos por el error medio cuadrático inferiores a 0,03 m, porque se hallan dentro de las precisiones establecidas para este tipo de trabajos [17].
A la misma elevación de 40 m, basados en otras investigaciones que miden la falla en pavimento con VANT, se obtuvieron resultados de desviación estándar de 6,7 cm entre la diferencia encontrada visualmente y la adquirida por el SIG de varias muestras [5]. Esta desviación es de magnitud mayor con la obtenida en el presente estudio, de 2,32 cm, por lo que los resultados son óptimos. La ortoimagen presenta una resolución de 1,29 cm/px, que permite la visualización de cualquier falla sobre la imagen y establecer medidas sobre ella.
Al evaluar las medidas realizadas tanto en campo como en el SIG, se aprecia una diferencia inferior a 5 cm. Existen valores de diferencia negativos, debido a que en el momento de calcular con el SIG no fue sobre el punto de referencia en campo.
Conclusiones
El uso de imágenes adquiridas por VANT es adecuado para la detección temprana de fallas superficiales sobre pavimento flexible. Así mismo, es riguroso respecto a la geometría del deterioro. El empleo de drones es muy preciso y rápido para levantamientos topográficos, debido a su alta resolución y fácil manejo, pues da resultados óptimos a la presente investigación. Además, es una alternativa económica y flexible para la adquisición de datos sobre las distintas fallas del pavimento.
La ortofotografía ha sido validada con los estándares de precisión para este tipo de trabajos. La precisión que se obtuvo del modelo, a partir del SfM, fue de 2,29 cm, que se la consideró adecuada. Esta precisión varía de acuerdo con el número y la calidad de las imágenes, así como con la cantidad de vegetación, resolución de la cámara, reflejo de la luz solar y otros factores influyentes.
Al analizar el pavimento flexible mediante un SIG con la ortoimagen, se observaron baches y grietas que pueden ser medidos por la calidad de la imagen y la orientación adecuada con los puntos de control.
La diferencia visual con el SIG oscila entre 0,17 y 5 cm. La desviación estándar fue de 2,32 cm, por lo que se recomienda el uso de VANT en el monitoreo del estado del pavimento.
Referencias
- SAE international, "Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles" SAE international Vol. J3016, n°J3016, 2018, p. 30
- P. Penmetsa, M. Hudnall, and S. Nambisan, “Potential safety benefits of lane departure prevention technology” IATSS Res. Vol. 43, n° 1, 2019, pp. 21–26
- "Intelligent Transport Systems – Lane departure warning systems – Performance requirements and test procedures", ISO. 2017.
- , "Regulation (EC) No 661/2009 of the European Parliament and of the Council as regards type-approval requirements for the installation of lane departure warning systems in motor vehicles", Commission Regulation (EU),n° 351l 2012. [On line]. Disponible: https://op.europa.eu/en/publication-detail/-/publication/59c0adba-4994-4e24-87a9-3601d888d9f3.[Accedido: 26 Nov- 2019]
- "Road marking materials - Road marking performance for road users and test methods", CEN/TC 226 - ROAD EQUIPMENT, 2018.
- Council of the European Union, Proposal for a Directive of the European Parliament and of the Council amending Directive 2008/96/EC on road infrastructure safety management. Brussels, 2019.
- Austroads, "Infrastructure Changes to Support Automated Vehicles on Rural and Metropolitan Highways and Freeways: Audit Specification (Module 1)", Publication no: AP-T347-19. Sydney: Austroads 2019.
- S. Cafiso, A. Di Graziano, C. D’Agostino, G. Pappalardo, and E. Delfino, “A new perspective in the road asset management with the use of advanced monitoring system & BIM” MATEC Web of Conferences Vol. 231, 2018, p. 01007.
- S. Cafiso, A. Di Graziano, D. G. Goulias, and C. D’Agostino, “Distress and profile data analysis for condition assessment in pavement management systems,” Int. J. Pavement Res. Technol. Vol. 12, n°. 5, pp. 527–536, Sep. 2019.
- Mobileye, “About Us - Mobileye,” 2020. [Online]. Disponible: https://www.mobileye.com/about/. [Accedido 01Sep-2020].
- J. L. Campbell, C. M. Richard, J. L. Brown, M. G. Lichty, J. Graham, and M. O’Laughlin, “NCHRP Report 600C – Human Factors Guidelines for Road Systems,” Washington, 2010.