Evaluación superficial de pavimentos rígidos en carreteras mediante ortoimágenes obtenidas mediante un vehículo aéreo no tripulado
Surface Evaluation of Rigid Pavements on Roads using Orthoimages Obtained through an Unmanned Aerial Vehicle
Artículos
Recibido: 08/08/2020
Aprobado: 25/09/2020
Autores
Pucha Aguinsaca Pablo Andrés
Zárate Torres Belizario Amador
Resumen
El artículo explora un método alterno de evaluación superficial del pavimento de redes viales que consiste en automatizar la recolección, el procesamiento y el análisis del estado del pavimento utilizando un vehículo aéreo no tripulado (VANT). El objetivo era evaluar la condición superficial del pavimento rígido de un tramo de carretera, empleando ortoimágenes obtenidas mediante un VANT y la metodología del índice de condición del pavimento. La investigación corresponde al tipo de diseño no experimental cuantitativo y transversal. Como resultado, la precisión obtenida con el ajuste de las imágenes VANT en la fase de procesamiento se halla dentro de las tolerancias establecidas para este tipo de trabajos, ya que están por debajo de los 0,03 metros. El error cometido entre la medida obtenida en campo y la realizada sobre la ortofoto se halla por debajo del RMSE del ajuste realizado con el algoritmo SfM, por lo que las distancias medidas y la condición del pavimento determinadas son confiables. Se concluye que el uso de la técnica VANT es adecuada para detectar y medir deterioros en la superficie de carreteras, porque se obtiene información detallada y precisa de su condición
Abstract
This research explores an alternative method of surface evaluation of road pavement, which consists of automating the collection, processing, and analysis of the state of the pavement using an unmanned aerial vehicle (UAV). The objective of this research is to evaluate the surface condition of the rigid pavement of a section of intramountainous road, using orthoimages obtained by UAV and the methodology of the pavement condition index. This is a nonexperimental quantitative and cross-research design. Hence, the precision obtained with the adjustment of the UAV images from the processing phase is accurate to the established tolerances for this type of work. They are below 0.03 meters, the committed error between the measure from the field, and the one from orthophoto is below the RMSE, and the adjustment made with the algorithm SfM. Thus, the measured distances and the condition of the pavement are reliable. It is concluded that the use of the UAV technique is adequate to detect and measure deterioration on the road surface and to obtain detailed and precise information on its condition
Introduction
Las carreteras desempeñan un papel indispensable como parte de la infraestructura de la sociedad [1]. En la actualidad, se observa el crecimiento de la red vial a gran escala en pequeñas y grandes ciudades, debido a la necesidad de movilizarse con calidad, seguridad y comodidad [2]. Por la importancia de las carreteras en los ámbitos internacional y local, se necesitan estudios, evaluaciones y planificaciones adecuadas, ya sea en el momento de su diseño, construcción de nueva infraestructura vial, mejoramiento o reconstrucción de la existente, así como evaluaciones para gestionar un adecuado mantenimiento vial. Para ello se necesitan datos reales y confiables que nos permitan tomar decisiones correctas [3]; todo esto con la finalidad de garantizar la calidad de la red vial, mejorar la circulación vehicular y evitar posibles accidentes.
La evaluación de las carreteras implica evaluaciones técnicas, funcionales y estructurales [4]. Dentro de la evaluación funcional se encuentra la superficial del pavimento, que define la actividad de mantenimiento que se debería ejecutar superficialmente en un pavimento, como bacheos, parchados, tratamientos de fisuras y sellados. La evaluación superficial del pavimento, además, brinda indicios para una solución estructural de acuerdo con la magnitud y tipo de falla, que se complementa con evaluaciones estructurales como recapeos, cambio y repotenciación del paquete estructural o base granular [5]. En esta investigación se abordó la evaluación superficial, porque se considera como un primer paso en la programación de mantenimientos y correcciones en las carreteras [5].
En el mundo, la evaluación del estado de la superficie del pavimento en carreteras se realiza con algunas metodologías, como el Índice de Condición del Pavimento (PCI, por sus siglas en inglés) [6], el Índice de Regularidad Internacional (IRI, por sus siglas en inglés) [7] y Visión e Inspección de Zonas e Itinerarios en Riesgo (VIZIR) [8]. El objetivo principal de estas metodologías es evaluar la condición del pavimento de una carretera según el daño, su irregularidad y falla superficial. Al aplicar estos métodos se registran todas las fallas existentes en un tramo de estudio, para proponer una solución adecuada según la condición o severidad en la que se encuentre. Los instrumentos que se utilizan para facilitar esta evaluación son las fotografías con cámaras digitales [9], fotogrametría a corto alcance [10], prueba de parche de arena [11] o fotogrametría con dron [12], [13].
En las redes locales y urbanas, el problema permanente de la escasez de gestión para las estrategias de mantenimiento, rehabilitación y reconstrucción ha llevado en muchos casos a utilizar técnicas no ajustadas o deficientes para evaluar, detectar y analizar los daños en el pavimento de carreteras, lo que conduce a resultados ineficaces. Por lo tanto, es necesario contar con herramientas que nos permitan evaluaciones rápidas y confiables para la rehabilitación oportuna de las vías [14], [15]. Actualmente, la evaluación superficial de pavimentos en Ecuador se realiza mediante las tres metodologías mencionadas, en la mayoría de casos. Así mismo, se está utilizando una técnica de fotogrametría que proporciona una mayor cobertura y permite visualizar los tipos de fallas en la superficie del pavimento [13], esto gracias al empleo de vehículos aéreos no tripulados (VANT) o unmanned aerial vehicle (UAV).
La técnica VANT ha demostrado su relevancia para la cartografía de las zonas de difícil acceso, el monitoreo de zonas de inundación, la inspección de pavimentos, el mapeo urbano y topográfico, la minería, los caminos forestales, etc. [15]-[21]. Además, se está considerando una nueva metodología eficaz y necesaria para adquirir datos espaciales de alta precisión no solo para evaluar pavimentos, sino para distintas utilidades [12]. La evaluación superficial de pavimentos mediante VANT es más beneficiosa, en cuanto a tiempos, seguridad y comodidad tanto de los usuarios de la vía evaluada como de los interesados en el estudio en comparación al método tradicional [15], [22], [23]. Los datos recolectados por el VANT pueden analizarse las veces que sean necesarios sin más vuelos; además, permiten observar la evolución y la aparición de nuevas fallas en forma temporal para tomar alternativas de mantenimiento vial adecuado [13].
El objetivo de la investigación fue evaluar la condición superficial actual del pavimento rígido de un tramo de carretera, empleando ortoimágenes obtenidas mediante un VANT, para definir las alternativas de intervención que requiere el pavimento a la fecha de la evaluación, y dentro de este concepto demostrar una aplicación más de estos equipos en la ingeniería civil como una nueva opción para el monitoreo y evaluación superficial de pavimentos con poca o ninguna interacción humana requerida, a fin de obtener un método viable y rápido que sirva, a su vez, para entidades encargadas de la gestión de las redes viales. Con las imágenes obtenidas con el uso del VANT se reconstruyen modelos tridimensionales (3D) de la zona de estudio, así como ortoimágenes, desde las cuales se realizan las mediciones correspondientes de los daños en el pavimento junto a la metodología PCI para evaluar el estado del pavimento.
La metodología de este artículo inicia con la revisión del estado del arte sobre las carreteras, tipos e instrumentos de evaluación superficial de pavimentos. Luego, con un plan experimental se define y evalúa la zona de prueba. Seguidamente, se analiza la zona de estudio para colocar una estación del tipo Global Navigation Satellite System (GNSS) no permanente, así como establecer puntos de control para obtener sus posiciones con equipo GNSS y luego obtener las fotografías con la técnica VANT. Después, se muestran las imágenes VANT procesadas en un software basado en Structure from Motion (SfM), para la generación de ortofotos y modelos digitales 3D, donde se identificaron y midieron todas las fallas, para luego aplicar la metodología PCI, a fin de evaluar el pavimento. Finalmente, se presentan los resultados obtenidos, discusión y las conclusiones correspondientes.
1. Metodología
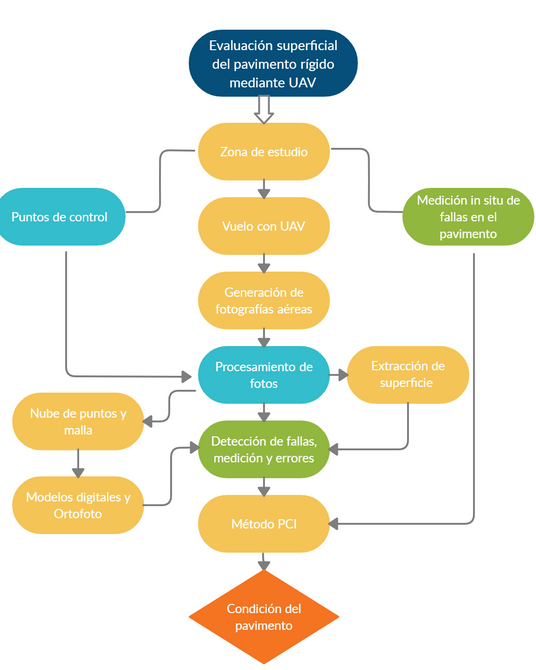
La presente investigación correspondió al tipo de diseño no experimental cuantitativo y transversal. Para la evaluación superficial de la condición del pavimento en la zona de estudio se siguió la metodología mostrada en la figura 1, que se resume en obtener datos de campo, seguido del procesamiento y análisis de la información, para finalmente aplicar la metodología PCI y evaluar el pavimento
Figura 1. Metodología propuesta para la evaluación del pavimento empleando VANT y el método PCI
1.1. Zona de estudio
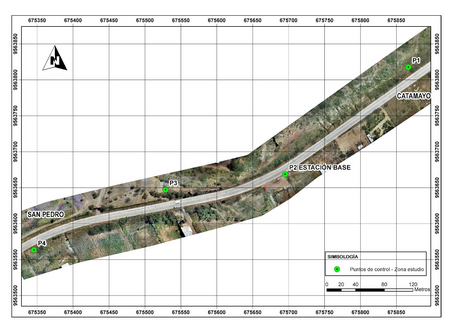
La zona de estudio (figura 2) corresponde al tramo comprendido entre la abscisa 5+256,00 a la 5+936,00 de la carretera Catamayo-San Pedro de la Bendita (carretera de montaña), correspondiente al eje transversal sur (E50)
Figura 2. Imagen aérea del tramo de prueba
En la tabla 1 se resumen las características del tramo de la vía de estudio
Tabla 1. Imagen aérea del tramo de prueba
| Denominación | E50, eje transversal surRuta: Huaquillas-Arenillas-Catamayo-Loja-Zamora |
| Tipo de carretera | Carretera de dos carriles, un carril por cada sentido de circulación |
| Tipo de pavimento | Rígido |
| Ancho de calzada | 9,60 metros |
| Longitud de losas | 4,00 metros |
| Configuración del tránsito | Tráfico liviano, mediano y pesado |
Para obtener los productos fotogramétricos georreferenciados y efectuar las medidas con precisión en la zona de estudio, se establecieron una estación GNSS no permanente, así como cuatro puntos de control. A fin de determinar sus coordenadas, se emplearon dos receptores GNSS marca Trimble modelo R6, con la técnica fast static en la estación base y con la técnica Real Time Kinetimatic (RTK) en los puntos de control. El sistema de referencia empleado es UTM WGS-84 zona 17S. El posproceso se realizó mediante el software Trimble Business Centre versión 2.2
1.2. Vehículo aéreo no tripulado
Las imágenes aéreas utilizadas para generar las ortofotos se obtuvieron empleando un VANT Mavic Pro de DJI (figura 3), provisto de una cámara frontal de 12,35 M con distancia focal de 2,2. Tiene una autonomía de vuelo de 27 min y un alcance de 13 km, con velocidad máxima horizontal y vertical de ascenso/descenso de 65 y 5/3 km/h, respectivamente. Su fuente de alimentación es una batería inteligente tipo LiPo 3S que proporciona un voltaje de 11,4 y una capacidad de 3830 mA/h
Figura 3. Dron DJI Mavic Pro utilizado en el estudio

El vuelo se planificó con la aplicación DroneDeploy, en la cual se introdujeron los siguientes valores: altura de vuelo: 25 metros; velocidad horizontal: 3 m/s; traslape longitudinal: 75 %, y traslape transversal: 70 %, lo que permitió tener una distancia de muestreo del terreno (GSD) de 0,92 cm/px.
Antes de realizar el vuelo, se utilizó la aplicación UAV Forecast para pronosticar el tiempo (clima, temperatura, viento, dirección viento, ráfagas, visibilidad, precipitación, Kp), y determinar de esta forma si existen las condiciones para volar. Para identificar los puntos de control desde el aire se emplearon blancos en forma de cruz para identificarlos en el procesamiento. Debido a las características topográficas y extensión de la zona de estudio en una carretera de montaña, hubo dos planificaciones de vuelo (figura 4).
Figura 4. Planificación de vuelo mediante DroneDeploy: a) tramo 1 y b) tramo 2

Ejecutada la planificación de los vuelos, se obtuvieron 949 imágenes en 2 vuelos: el primero, con una duración de 19 min, y el segundo, de 23 min. Para la fase de generación de ortofoto, se utilizó el software pix4dmapper versión 4.5.6, con licencia de prueba, la cual no presenta limitaciones de uso, sino restricción de tiempo, a diferencia de la licencia completa. El procesamiento en este software consistió en generar la nube de puntos, malla, georreferenciación con los puntos de control, obtención de textura y la generación de ortofoto.
Para el levantamiento de las fallas existentes en campo por el método convencional se emplearon hojas de inspección, catálogo de fallas como referencia, instrumentos de medición, equipo de protección, fotografías digitales y, además, se cerró parcialmente la carretera por el tráfico de vehículos. Se identificaron y midieron todas las fallas en el tramo de estudio. El tiempo total de evaluación de todas las fallas en el tramo fue de 15 h con un rendimiento de inspección promedio de 5 min por cada falla con dos personas evaluadoras; esto por la cantidad de deterioros encontrados y el tránsito de vehículos.
Detección y medición de daños del pavimento en la ortofoto generada. Mediante la ortofoto generada se registraron los daños identificados en el pavimento de la zona de estudio, con lo cual se logró determinar la longitud o área según el tipo de falla. Se tuvo como resultado un total de 290 daños, empleando el software pix4dmapper, hojas de inspección digitales y una persona evaluadora
1.3. Aplicación del método PCI para evaluar la condición del pavimento
Para obtener la muestra representativa del lote de semillas, se usó el método secuencial que, como lo exponen [13] y [14], consiste en tomar muestras primarias que provienen de diferentes envases de un mismo lote y de las distintas partes (media, baja y superior), para posteriormente mezclarlas y obtener así una muestra compuesta homogénea. Una vez llevado a cabo este procedimiento, la muestra se divide mecánicamente de manera secuencial para conseguir una muestra presentada, que es aquella con la cual se realizaron los análisis y la evaluación de calidad. El peso específico de la muestra se obtuvo según lo indicado por [15].
2. Resultados
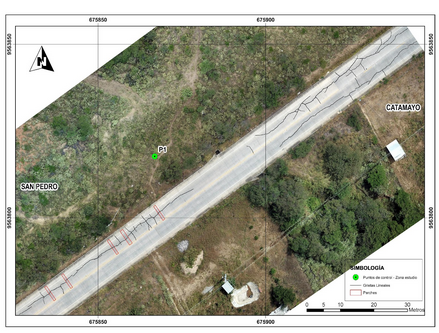
Luego del procesamiento de las imágenes se generó la ortofoto de la zona de estudio, como se indica en la figura 5
Figura 5. Producto fotogramétrico, ortofoto con grietas lineales y parches identificados
Producto de los ajustes de los puntos de control se obtuvieron las siguientes precisiones, representadas en los errores X, Y, Z y el error medio cuadrático horizontal XY (tabla 2)
Tabla 2. Errores de ajuste de los puntos de control
| Puntos de control | Precisión XY/Z (m) | Error X (m) | Error Y (m) | Error Z (m) |
| PC1 (3D) | 0,020/0,020 | −0,003 | 0,005 | 0,000 |
| PC2 (3D) | 0,020/0,020 | 0,012 | −0,030 | 0,000 |
| PC3 (3D) | 0,020/0,020 | −0,020 | 0,035 | 0,000 |
| PC4 (3D) | 0,020/0,020 | 0,011 | −0,011 | 0,000 |
| Media (m) | −0,00002 | 0,000058 | −0,00012 | |
| Desviación estándar (m) | 0,013049 | 0,023847 | 0,000303 | |
| Error medio cuadrático RMSE (m) | RMSE XY 0,027184 | RMSE X 0,013049 | RMSE Y 0,023847 | RMSE Z 0,000326 |
La tabla 3 muestra las longitudes de las grietas lineales seleccionadas para validar el método. Existieron 30 grietas lineales (figura 6), denominadas G1, G2… Gn. Se determinaron mediante las mediciones in situ y las mediciones realizadas con la ortofoto
Figura 6. Grieta lineal identificada y medida en campo

Tabla 3. Comparación entre la longitud real medida en sitio y mediante el procesamiento de imágenes aéreas VANT de grietas lineales identificadas en la vía de prueba
| Grietas lineales | Medida en sitio (m) | Medida VANT a 25 m (m) | Error (m) |
| G1 | 4,21 | 4,19 | 0,02 |
| G2 | 3,25 | 3,26 | 0,01 |
| G3 | 4,16 | 4,19 | 0,03 |
| G4 | 4,23 | 4,25 | 0,02 |
| G5 | 1,66 | 1,66 | 0,00 |
| G6 | 4,21 | 4,20 | 0,01 |
| G7 | 1,05 | 1,05 | 0,00 |
| G8 | 2,80 | 2,80 | 0,00 |
| G9 | 3,23 | 3,24 | 0,01 |
| G10 | 2,56 | 2,57 | 0,01 |
| G11 | 0,93 | 0,92 | 0,01 |
| G12 | 1,66 | 1,66 | 0,00 |
| G13 | 0,69 | 0,66 | 0,03 |
| G14 | 4,20 | 4,20 | 0,00 |
| G15 | 1,84 | 1,86 | 0,02 |
| G16 | 3,43 | 3,45 | 0,02 |
| G17 | 2,36 | 2,36 | 0,00 |
| G18 | 4,05 | 4,08 | 0,03 |
| G19 | 1,90 | 1,93 | 0,03 |
| G20 | 4,14 | 4,17 | 0,03 |
| G21 | 1,86 | 1,85 | 0,01 |
| G22 | 4,15 | 4,14 | 0,01 |
| G22 | 4,15 | 4,14 | 0,01 |
| G23 | 2,40 | 2,39 | 0,01 |
| G24 | 2,85 | 2,82 | 0,03 |
| G25 | 3,55 | 3,56 | 0,01 |
| G26 | 4,10 | 4,13 | 0,03 |
| G27 | 4,53 | 4,50 | 0,03 |
| G28 | 1,90 | 1,91 | 0,01 |
| G29 | 1,45 | 1,43 | 0,02 |
| G30 | 2,52 | 2,53 | 0,01 |
| Desviación estándar (m) | 0,0109 | ||
La tabla 4 muestra las medidas de deterioros tipo parche (figura 7). Existieron 6 fallas de este tipo en todo el tramo de estudio: P1, P2, P3, P4, P5 y P6
Figura 7. Parche grande identificado y medido en campo
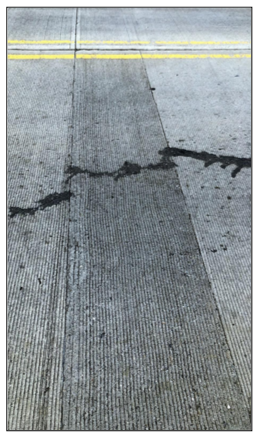
Tabla 4. Comparación entre el área real medida en sitio y mediante el procesamiento de imágenes aéreas de VANT de parches identificados en la vía de prueba
| Parches | Medida en sitio (m2) | Medida VANT a 25 m (m2) | Error (m2) |
| P1 | 2,88 | 2,88 | 0,00 |
| P2 | 4,32 | 4,27 | 0,05 |
| P3 | 2,88 | 2,86 | 0,02 |
| P4 | 2,88 | 2,83 | 0,05 |
| P5 | 2,88 | 2,84 | 0,04 |
| P6 | 2,88 | 2,85 | 0,03 |
| Desviación estándar (m2) | 0,0177 | ||
En la tabla 5 se muestran los resultados de la evaluación del pavimento aplicando la metodología PCI en las 17 muestras de la vía
Tabla 5. Resultados del índice PCI mediante el método VANT. Parche grande identificado y medido en campo
| Muestra | Asbcisa de inicio | Coordenadas PCI-VANT | Condición del pavimento | |
| M1 | 05+256,00 | 675941,378 | E 9563850,817 | N 40 Pobre |
| M2 | 05+296,00 | 675908,933 E 9563827,565 N | 76 | Muy Bueno |
| M3 | 05+336,00 | 675876,385 E 9563804,292 N | 58 | Bueno |
| M4 | 05+376,00 | 675843,851 E 9563781,094 N | 69,5 | Bueno |
| M5 | 05+416,00 | 675811,313 E 9563757,817 N | 87 | Excelente |
| M6 | 05+456,00 | 675778,827 E 9563734,605 N | 80 | Muy Bueno |
| M7 | 05+496,00 | 675746,274 E 9563711,45 N | 100 | Excelente |
| M8 | 05+536,00 | 675713,677 E 9563688,273 N | 100 | Excelente |
| M9 | 05+576,00 | 675679,493 E 9563667,583 N | 80 | Muy Bueno |
| M10 | 05+616,00 | 675642,954 E 9563651,073 N | 66 | Bueno |
| M11 | 05+656,00 | 675604,775 E 9563639,510 N | 80 | Muy Bueno |
| M12 | 05+696,00 | 675565,616 E 9563631,652 N | 49 | Regular |
| M13 | 05+736,00 | 675526,299 E 9563624,217 N | 45 | Regular |
| M14 | 05+776,00 | 675486,929 E 9563616,783 N | 41,5 | Regular |
| M15 | 05+816,00 | 675447,797 E 9563609,242 N | 45 | Regular |
| M16 | 05+856,00 | 675408,692 E 9563600,405 N | 52 | Regular |
| M17 | 05+896,00 | 675370,935 E 9563587,361 N | 74 | Muy Bueno |
Según los resultados obtenidos, en la vía de prueba existen desde condiciones pobres (M1) a condiciones excelentes (M5, M7, M8) con diferentes tipos de deterioros que se mencionan a continuación: grieta de esquina, losa dividida, grietas lineales y de durabilidad, parches y punzonamiento, con severidades desde bajas hasta altas. Los resultados de tipos de daños evaluados mediante el método PCI en la vía de prueba indican que se tienen 6 tipos de deterioros, con un mayor número y densidad de daño de tipo grieta lineal en las 17 muestras evaluadas. Según la evaluación, hay un mayor número de muestras del estado del pavimento con condiciones aceptables.
Como medida de mantenimiento o rehabilitación de las fallas encontradas a la fecha de evaluación del pavimento con la metodología PCI se tiene lo siguiente: sellados de grietas, parcheos profundos, remplazo de losa y remplazo de parche.
3. Discusión
Los resultados de la tabla 2 demuestran que la precisión obtenida con el ajuste de las imágenes VANT en la fase de procesamiento se hallan dentro de las tolerancias establecidas para este tipo de trabajos, ya que se encuentran por debajo de los 0,03 m. Estos errores están de acuerdo con los errores reportados por estudios que han utilizado el algoritmo SfM [24]-[26].
Las mediciones en grietas presentan una desviación estándar del error en las mediciones de 0,0109 m por debajo al obtenido con VANT. La diferencia radica en el grado de refinamiento para medir distancias sobre la ortofoto, puesto que puede existir una falsa apreciación de la posición que se desee medir.
Tomando en cuenta que se trata de mediciones longitudinales, el error cometido entre la medida obtenida en campo y la realizada sobre la ortofoto se encuentra por debajo de la incertidumbre dada por el error cuadrático medio (RMSE) del ajuste realizado con el algoritmo SfM, por lo que son confiables las distancias medidas en este caso en particular.
El error en los deterioros medidos por el método convencional y el método VANT da como resultado un error absoluto promedio en longitud de 0,015 m o 1,5 cm (grietas lineales) y en área de 0,03 m2 (parches) con una desviación estándar para este tipo de falla de 0,0177 m2. El error es la diferencia entre el valor observado y el valor real, cada punto de datos tiene un error.
Para evaluar las diferencias entre los dos tipos de mediciones in situ (método convencional) y mediante VANT, también se determinó el RMSE de estas dos mediciones, que dieron como resultado un valor para grietas lineales de 0,0185 m (1,85 cm) y para parches de 0,0363 m2. Las mediciones se dividieron en dos partes: medición in situ y medición con VANT. La medición del VANT se realizó a 25 m de altitud. Los resultados indicaron que se mostró una mayor diferencia de error en las grietas G3, G13, G18, G19, G20, G24, G26 y G27, que fueron de aproximadamente 0,03 m; mientras que para la diferencia más baja o error fueron las grietas G5, G7, G8, G12, G14 y G17, que fue de aproximadamente 0,00 m. Para los deterioros tipo parche el valor más alto de error fue en los parches P2 y P4, de 0,05 m2; entre tanto, el valor más bajo fue en el parche P1, de 0,00 m2.
Becker et al. [27], en su investigación sobre la comparación de softwares de fotogrametría digital para la caracterización de masa de roca, indicó en sus resultados que el software pix4dmapper obtuvo un error medio cuadrático horizontal (RMSE XY) de 0,0206 pies (0,00628 m) y un valor de RMSE mínimo para puntos de control de 0,000 pies y máximo de 0,0250 pies (0,00762 m) a una altura de vuelo de 30 a 45 pies (9 a 14 m) de la zona de estudio con 5 puntos de control. Tomaštík et al. [28], por su parte, obtuvieron en sus resultados precisiones de RMSE horizontales de 0,040 m a 0,114 m con 4 puntos de control y RMSE horizontales de 0,037 m a 0,075 m con 9 puntos de control, a una altura de vuelo de 50 a 60 m. Hrůza et al. [29] obtuvieron como resultado un RMSE posicional de 0,0118 m con 15 puntos de control a una altura de vuelo de 4 a 6 m de una carretera. Zeybek y Serkan [15] alcanzaron precisiones de error RMSE entre mediciones mediante software y mediciones en campo de 0,010 m en mediciones de diámetros y 0,076 m en longitudes a una altura promedio de vuelo de 5,5 m sin puntos de control en el software pix4dmapper.
Los valores de RMSE fueron consistentes con la investigación planteada. Los resultados muestran que las mediciones con el software pix4dmapper son similares a las obtenidas con el método de inspección tradicional. Todos estos resultados nos indican la validación del método para evaluar el pavimento mediante un VANT.
En cuanto a los rendimientos obtenidos, con el método convencional se tuvo la evaluación de las 17 unidades de muestra en un tiempo de 8 h; por su parte, con el método VANT se levantó la información de las 17 unidades de muestra en 1 h. En oficina, el tiempo total de procesamiento, edición de ortofoto, identificación y contabilización de fallas fue de 5 h. Con el método VANT, si aparecen vehículos en las imágenes obtenidas, se pueden eliminar o modificar, en aras de generar una ortofoto de la vía libre para su análisis. Además, esta ortofoto permite identificar el lugar de cada falla y registrarlas, para evaluar y medir sus respectivas dimensiones con fines de una futura intervención.
Schnebele et al. [30] mencionan que los métodos tradicionales proporcionan información precisa y valiosa, pero obtener estos datos lleva mucho tiempo. Además, cuando la interpretación de la severidad del daño se determina según el juicio (aunque existan criterios de calificación bien establecidos), los resultados pueden variar. Por lo tanto, la integración de métodos alternativos más automatizados y semiautomatizados es inevitable y proporciona resultados importantes, al cubrir mayor área de evaluación. Haas y McNeil [31], por su parte, indican que la evaluación tradicional es subjetiva, y esto casi siempre conduce a inconsistencias en el detalle de los daños. En consecuencia, las evaluaciones convencionales se limitan a pequeños tamaños de muestra, procedimientos sencillos de mantenimiento y recopilación de datos poco frecuente, en comparación con las técnicas automatizadas, que son potencialmente más consistentes y completas.
Al aplicar el método convencional en campo con la utilización de instrumentos de medición, catálogo de fallas, equipo de protección y fotografías digitales, en comparación con la aplicación del método VANT, puntos de control, software de procesamiento y productos fotogramétricos, se tiene que el método VANT es más óptimo, porque automatiza el procedimiento de evaluación, tiene un menor tiempo de recolección y evaluación de la información, menor número de personas para la inspección, mejor precisión y calidad en los datos recopilados [30], mayor seguridad al momento de realizar el levantamiento de la superficie de la carretera sin obstruir el tránsito y mayor cobertura deL área de evaluación [13], [30]. Sin embargo, la aplicación del método convencional conjuntamente con el método VANT brinda una mayor confianza en los datos recolectados y evaluados.
Conclusiones
En la ingeniería de carreteras, la inspección del estado de la carretera es un proceso riguroso que requiere una imagen detallada y completa antes de tomar las adecuadas medidas de mantenimiento o rehabilitación. Sin embargo, los métodos de inspección convencionales requieren demasiado tiempo, trabajo intensivo y, en la mayoría de las ocasiones, es inseguro para todos los usuarios de la carretera. Este artículo propuso un método automático y eficiente para evaluar el estado de la superficie de una carretera utilizando imágenes de fotogrametría VANT y la metodología PCI. De esta manera, se obtuvieron las siguientes conclusiones:
Se evaluó la condición superficial del pavimento rígido de un tramo de la carretera Catamayo-San Pedro de la Bendita, empleando ortoimágenes obtenidas mediante VANT y la metodología del PCI, que dio como resultado un estado del pavimento promedio “Bueno”. De acuerdo con la evaluación y los resultados obtenidos, se observaron 6 tipos de deterioros y severidades desde bajas hasta altas, con un mayor número y densidad de daño de tipo grieta lineal en toda la zona de estudio. Con la técnica VANT y la metodología PCI se evaluaron 17 muestras de pavimento rígido de 40 m de longitud cada una, en un tramo de estudio de 680 m, donde se obtuvieron 185 losas con daños de un total de 340 losas de hormigón. Se propusieron alternativas de intervención o medidas correctivas de mantenimiento que requiere el pavimento a la fecha de evaluación, según el tipo de daño encontrado en la evaluación superficial.
En cuanto a las mediciones de fallas obtenidas de la técnica VANT, se compararon con las mediciones del método de inspección tradicional en campo. Se encontró que ambas mediciones produjeron resultados similares y que el error de longitud y área de la detección fue a nivel de centímetro, lo que implica una perspectiva prometedora en la práctica de la ingeniería civil. Por su parte, el software pix4dmapper tuvo una buena precisión para los puntos de control indicados anteriormente, los cuales se consideran beneficiosos para una mejor precisión del modelo. Con el ajuste de las imágenes VANT en la etapa de procesamiento se obtuvo una precisión aceptable dentro del margen establecido para este tipo de trabajos, ya que se encuentra por debajo de los 0,03 m. Así, el error cometido entre la medida obtenida en campo y la realizada sobre la ortofoto se halla por debajo del RMSE del ajuste realizado con el algoritmo SfM, por lo que son confiables las distancias medidas y las condiciones del pavimento determinadas.
Se concluye que el uso de la técnica de medición VANT es adecuada cuando se busca detectar y medir fallas en la superficie de la carretera, ya que se puede obtener información precisa y detallada sobre la superficie de la carretera a partir de datos 2D y 3D. Los resultados de esta investigación trazan un enfoque óptimo en pro de planificar intervenciones necesarias para restaurar el pavimento de la carretera a un nivel aceptable. La ventaja de este enfoque sobre los métodos de inspección tradicionales es que se realiza en un flujo de tráfico normal y que no es necesario cerrar parcial o totalmente la vía para ejecutar el levantamiento. El uso del VANT permite el levantamiento de información en corto tiempo, sin poner en riesgo la vida de las personas que llevan a cabo la evaluación.
El sistema efectuado en esta investigación mide daños y evalúa la condición de la carretera, por lo que es una nueva opción para el monitoreo y la evaluación superficial de pavimentos y podría ser de ayuda para instituciones encargadas de los ejes viales, frente a la toma de decisiones para una mejor gestión de carreteras.
El trabajo futuro se centrará en incrementar el área de evaluación, así como en mejorar la precisión y la eficiencia de este método, teniendo en cuenta que el despliegue de más puntos de control podría incrementar la precisión del modelo. Generalmente, hay muchas marcas estables con características geográficas conocidas a lo largo de las carreteras, que podrían utilizarse como puntos de control en modelado 3D y extracción de características sin mucho esfuerzo en términos de trabajo de campo.
Referencias
- J. Wang, H. González, R. Lindenbergh, P. Arias-Sánchez y M. Menenti, “Automatic estimation of excavation volume from laser mobile mapping data for mountain road widening”, Remote Sens., vol. 5, n.º 9, pp. 4629-4651, 2013. https://doi.org/10.3390/rs5094629
- D. Cárdenas, O. Holguín y S. Zabala, “Auscultación visual realizada mediante el drone dji phantom 4 pro, con implementación de metodologías VIZIR y PCI para pavimentos flexibles en la carretera 69B sur entre la avenida Primera de Mayo y calle 9A sur-Barrio villa Claudia-Ciudad Bogotá”, tesis de grado, Univ. Piloto, Bogotá, Colombia, 2019.
- P. J. Grandsaert, “Integrating pavement crack detection and analysis using autonomous unmanned aerial vehicle imagery”, tesis de maestría, Air Force Institute of Technology, Ohio, Estados Unidos, 2015. [En línea]. Disponible: https://scholar.afit.edu/etd/147/
- G. Thenoux y R. Gaete, “Evaluación técnica del pavimento y comparación de métodos de diseño de capas de refuerzo asfáltico”, Rev. Ing. Constr., n.º 14, pp. 56-72, 1995.
- S. Sarsam, A. Daham y A. Ali, “Assessing close range photogrammetric approach to evaluate pavement surface condition”, J. Eng., vol. 22, n.º 1, pp. 1-14, 2016.
- ASTM D6433-99 International, “Procedimiento estándar para la inspección del índice de condición del pavimento en caminos y estacionamientos”, 2011.
- S. A. Arhin, L. N. Williams, A. Ribbiso y M. F. Anderson, “Predicting pavement condition index using International Roughness Index in a dense urban area”, J. Civ. Eng. Res., vol. 5, n.º 1, pp. 10-17, 2015. https://doi.org/10.5923/j.jce.20150501.02
- P. Autret y J. Brousse, “VIZIR-Méthode d’evaluation des chaussees souples”. Bulletin des laboratoires des Ponts et Chaussées, n.º especial XVII, 1994.
- S. Sarsam, “Visual assessment of pavement surface condition for Baghdad International Airport”, Int. J. Transp. Eng. Traffic Syst., vol. 2, n.º 1, pp. 1-9, 2015 [En línea]. Disponible en: https://www.researchgate.net/publication/300428815. [Accedido: 05-dic-2019].
- S. Sarsam, A. Daham y A. M. Ali, “Comparative assessment of using visual and close range photogrammetry techniques to evaluate rigid pavement surface distresses”, Trends Transp. Eng. Appl., vol. 2, n.º 2, pp. 28-36, 2015 [en línea]. Disponible: http://engineeringjournals.stmjournals.in/index.php/TTEA/article/view/2814. [Accedido: 05-dic-2019].
- S. I. Sarsam y A. M. Ali, “Assessing pavement surface macrotexture using sand patch test and close range photogrammetric approaches”, Int. J. Mater. Chem. Phys., vol. 1, n.º 2, pp. 124-131, 2015 [en línea]. Disponible: http://www.aiscience.org/journal/ijmcp. [Accedido: 05-dic-2019].
- P. Martínez Fernández, D. Dayamit Ojeda Martínez, E. Pérez García y F. Bravo Lorenzo, “Vehículos aéreos no tripulados (VANT) en Cuba, aplicados a la geomática: estado actual, perspectivas y desarrollo”, Cuba, 2014. [En línea]. Disponible: http://observatoriogeograficoamericalatina.org.mx/egal15/Nuevastecnologias/Teledeteccion/10.pdf
- J. Cruz y J. Gutiérrez, “Evaluación superficial de vías urbanas empleando vehículo aéreo no tripulado (VANT)”, Métodos Materiales, vol. 8, pp. 23-32, 2018. https://doi.org/10.15517/MYM.V8I1.34113
- L. Inzerillo, G. Di Mino y R. Roberts, “Image-based 3D reconstruction using traditional and UAV datasets for analysis of road pavement distress”, Autom. Constr., vol. 96, pp. 457-469, 2018. https://doi.org/10.1016/j.autcon.2018.10.010
- M. Zeybek y B. Serkan, “Road distress measurements using UAV”, Turkish J. Remote Sens. GIS, vol. 1, n.º 1, pp. 13-23, 2020 [en línea]. Disponible en: https://dergipark.org.tr/en/pub/rsgis/issue/50577/678805 [Accedido: 02-may-2020].
- A. A. Doshi, A. J. Postula, A. Fletcher y S. P. N. Singh, “Development of micro-UAV with integrated motion planning for open-cut mining surveillance”, Microprocess. Microsyst., vol. 39, pp. 829-835, 2015. https://doi.org/http://dx.doi.org/10.1016/j.micpro.2015.07.008
- Q. Feng, J. Liu y J. Gong, “Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier: a case of Yuyao, China”, Water, vol. 7, pp. 1437-1455, 2015. https://doi.org/10.3390/w7041437
- E. Buğday, “Capabilities of using UAVs in forest road construction activities”, Eur. J. For. Eng., vol. 4, n.º 2, pp. 56-62, 2018. https://doi.org/10.33904/ejfe.499784
- K. Johansen, P. D. Erskine y M. F. McCabe, “Using unmanned aerial vehicles to assess the rehabilitation performance of open cut coal mines”, J. Clean. Prod., vol. 209, pp. 819-833, 2019. https://doi.org/https://doi.org/10.1016/j.jclepro.2018.10.287
- A. Pijl, M. Tosoni, G. Roder, G. Sofia y P. Tarolli, “Design of terrace drainage networks using UAV-based high-resolution topographic data”, Water, vol. 11, n.º 4, p. 814, 2019. https://doi.org/10.3390/w11040814
- J. Tomaštík, M. Mokroš, P. Surový, A. Grznárová y J. Merganič, “UAV RTK/PPK method-an optimal solution for mapping inaccessible forested areas?”, Remote Sens., vol. 11, n.º 6, p. 721, 2019. https://doi.org/10.3390/rs11060721
- A. M. Saad y K. N. Tahar, “Identification of rut and pothole by using multirotor unmanned aerial vehicle (UAV)”, Measurement, vol. 137, pp. 647-654, 2019. https://doi.org/https://doi.org/10.1016/j.measurement.2019.01.093
- Y. Tan y Y. Li, “UAV photogrammetry-based 3D road distress detection”, ISPRS Int. J. Geo-Information, vol. 8, n.º 9, p. 409, 2019. https://doi.org/10.3390/ijgi8090409
- D. Turner, A. Lucieer y S. M. de Jong, “Time series analysis of landslide dynamics using an Unmanned Aerial Vehicle (UAV)”, Remote Sens., vol. 7, n.º 2, pp. 1736-1757, 2015. https://doi.org/10.3390/rs70201736
- M. V. Peppa, J. P. Mills, P. Moore, P. E. Miller y J. E. Chambers, “Accuracy assessment of a uav-based landslide monitoring system”, Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci., vol. XLI-B5, pp. 895-902, 2016. https://doi.org/10.5194/isprsarchives-XLI-B5-895-2016
- B. U. Meinen y D. T. Robinson, “Streambank topography: an accuracy assessment of UAV-based and traditional 3D reconstructions”, Int. J. Remote Sens., vol. 41, n.º 1, pp. 1-18, 2020. https://doi.org/10.1080/01431161.2019.1597294
- R. E. Becker, L. J. Galayda y M. M. MacLaughlin, “Digital photogrammetry software comparison for rock mass characterization”, Am. Rock Mech. Assoc., pp. 1-7, 2018 [en línea]. Disponible: https://par.nsf.gov/servlets/purl/10066209
- J. Tomaštík, M. Mokroš, S. Saloš, F. Chudỳ y D. Tunák, “Accuracy of photogrammetric UAV-based point clouds under conditions of partially-open forest canopy”, Forests, vol. 8, n.º 5, p. 151, 2017. https://doi.org/10.3390/f8050151
- P. Hrůza, T. Mikita, y P. Janata, “Monitoring of forest hauling roads wearing course damage using unmanned aerial systems”, Acta Univ. Agric. Silvic. Mendelianae Brun., vol. 64, n.º 5, pp. 1537-1546, 2016. https://doi.org/10.11118/actaun201664051537
- E. Schnebele, B. F. Tanyu, G. Cervone y N. Waters, “Review of remote sensing methodologies for pavement management and assessment”, Eur. Transp. Res. Rev., vol. 7, n.º 7, pp. 1-19, 2015. https://doi.org/10.1007/s12544-015-0156-6
- C. Haas y S. Mcneil, “criteria for evaluating pavement imaging systems”, Transportation Research Record 1260, pp. 64-73, 1990 [en línea]. Disponible: http://onlinepubs.trb.org/Onlinepubs/trr/1990/1260/1260-007.pdf