1. INTRODUCCIÓN
A pesar de las campañas educativas que se realizan actualmente en el mundo, las personas no adoptan una costumbre para la adecuada separación de basuras, que es una de las alternativas en la reducción de los residuos sólidos y una forma directa de aportar al reciclaje, que consiste en volver a utilizar materiales desechados pero que aún son aptos para elaborar otros productos. Son muchas las razones para realizar una correcta separación de los residuos; por ejemplo, el ahorro en recursos, reducir la contaminación, evitar la deforestación y, lo más importante, generar un impacto positivo en el medioambiente.
Debido a que este problema es frecuente en todo el mundo, algunos autores han propuesto soluciones como el diseño de diversos prototipos y dispositivos. En 1 se plantea el desarrollo de un sistema de control para el reconocimiento y clasificación de residuos reciclables, utilizando sensores ópticos, capacitivos e inductivos para identificar los materiales que se deben reciclar y una placa controladora Arduino Mega para la gestión y control de estos sensores.
Otros diseños como el de 2, plantean una solución similar, con la construcción de una caneca que automáticamente registra el material, lo identifica y lo dirige a un determinado contenedor. Este prototipo, además, envía registros del nivel al que se encuentra el volumen del dispositivo. En 3 se diseñó e implementó un dispositivo denominado Clasificador Automático de Residuos Sólidos, que se creó utilizando sensores capacitivos e inductivos en la parte de identificación, servomotores en la etapa de mecanismos y un Controlador Lógico Programable (PLC) en la etapa de control. Otros contenedores inteligentes como el de 4 pudieron diferenciar y separar tres tipos de materiales (aluminio, plástico y vidrio) con una metodología denominada de manufactura esbelta para reducir el tiempo de separación de los desperdicios. La integración de tecnologías como la identificación por radiofrecuencia (RFID) también se ha utilizado para contenedores inteligentes, como el propuesto por 5.
Algunos prototipos van más allá de la separación y de la identificación de residuos, como el de 6, que aborda la problemática del reciclaje implementando un prototipo para identificar y separar materiales utilizando una metodología para crear objetos de uso diario. La energía solar también se ha utilizado en este tipo de dispositivos. En 7 se propuso el diseño y construcción de un separador de desechos sólidos para su reciclaje automático alimentado por un sistema solar fotovoltaico autónomo, que permite mitigar la contaminación que existe sobre el suelo y la atmósfera. En 8 se diseñó y creo un basurero inteligente para el beneficio de un centro educativo en El Salvador (Centro América). Este proyecto incorporó tecnología contemporánea en un producto tradicional como los contenedores que se utilizan como separadores de residuos. Otros prototipos para la separación o detección automática de residuos han sido propuestas con tecnologías, como Arduino 9-11 y Raspberry Pi 12,13.
Para el diseño de dispositivos de desechos también se han tenido enfoques no tanto en la separación o detección electrónica sino en el diseño del producto de acuerdo con las necesidades 14.
Como se puede observar, se han propuesto y diseñado múltiples dispositivos que aportan a la separación inteligente de residuos y, por ende, al medioambiente, pero no aportan directamente a la generación de una cultura y una conciencia del reciclaje, ya que hacen el trabajo de las personas e incentivan más bien al desconocimiento sobre la separación adecuada de residuos. Por esta razón, en este trabajo se propone el diseño de un prototipo electrónico interactivo que permita generar, mediante un uso cotidiano, una cultura adecuada de separación, de acuerdo con el tipo de residuo. El dispositivo propuesto usará comandos de voz, permitiendo a las personas decir el tipo de objeto que desea desechar y abriendo únicamente la caneca asociada al tipo de residuo del objeto mencionado. La información de voz ingresa a través de un micrófono a un dispositivo Raspberry pi 3, que se encarga de procesarla, convertirla a texto y activar los mecanismos asociados a la caneca, según corresponda al residuo.
2. METODOLOGÍA
Para resolver este problema se estableció una metodología que consta de tres partes: marco teórico, diseño experimental y resultados.
2.1 MARCO TEÓRICO
El desarrollo de este prototipo se fundamenta en tecnologías que incorporan electrónica de bajo costo y reconocimiento de voz, permitiendo tener una variedad de opciones para crear herramientas que ayuden a las personas con malos hábitos en la disposición de los residuos. En este apartado se expone la teoría para tener un criterio más amplio en el diseño y construcción de un dispositivo capaz de activar actuadores, por medio de comandos de voz, que ayuden a solucionar esta problemática.
2.1.1 PLACA CONTROLADORA RASPBERRY PI
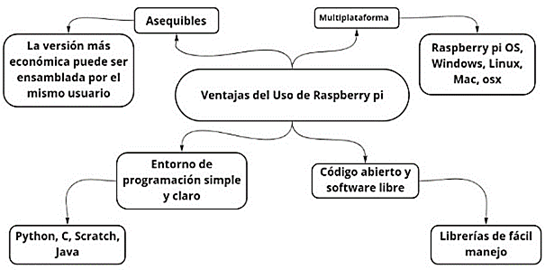
Las Raspberry PI son una serie de ordenadores de bajo costo, desarrollados en el Reino Unido por la fundación Raspberry pi, con el objetivo de poner en las manos de las personas el poder de la informática y la creación digital. El modelo original buscaba promover la enseñanza de la informática en las escuelas; sin embargo, terminó siendo más popular de lo que se esperaba. En la Figura 1 se presentan las principales ventajas para el uso de esta placa controladora. La Figura 2 muestra una imagen real de la tarjeta.

2.1.2 Reconocimiento de voz
El habla es el medio de comunicación más común y la mayoría de las personas en el mundo dependen del habla para comunicarse. Los sistemas de reconocimiento de voz básicamente traducen los idiomas hablados a texto. Existen varios ejemplos de sistemas de reconocimiento de voz como, por ejemplo, Apple Siri y Google.
2.1.3 Bibliotecas de reconocimiento de voz más utilizadas
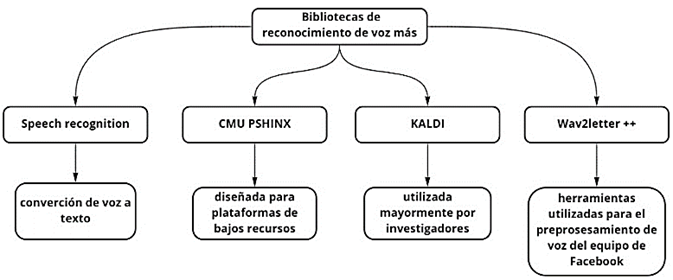
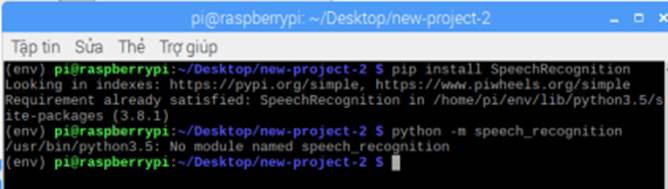
Actualmente existe un sinnúmero de bibliotecas o librerías que permiten realizar reconocimiento de voz (Figura 3). La más utilizada para el reconocimiento de las palabras y la conversión de voz a texto con posibilidades de uso en el Raspberry Pi son speech recognition, con un complemento pi audio. En la Figura 4 se ilustra la conversión de voz a texto.

2.1.4 Tarjeta de sonido interna o externa
La tarjeta de sonido externa (Figura 5) es un dispositivo que permite obtener una entrada o una salida de audio directamente del puerto USB de un equipo del que se desea obtener dicha información. Permite grabar, editar y, por supuesto, escuchar cualquier tipo de sonido. Las tarjetas de sonido internas vienen integradas directamente a la mainboard o tarjeta principal, se diferencian del tipo USB en que las primeras ofrecen una mayor versatilidad al momento de conectarse a un equipo.

2.1.5 Micrófono
Dispositivo que permite captar las ondas sonoras que se encuentran en el aire y convertirlas en una señal eléctrica. Se puede decir que un micrófono es un transductor que transforma la energía acústica en energía eléctrica. Esta última sirve como preamplificador para incrementar la intensidad del sonido y hacerlo identificable y reproducible. Esta señal se puede amplificar en dispositivos como consolas, ecualizadores y distintos procesos de audio. En la Figura 6 se muestra un ejemplo de un micrófono simple, que se puede conectar en algunos dispositivos móviles y equipos de cómputo, como la Raspberry Pi.

2.1.6 SERVOMOTOR
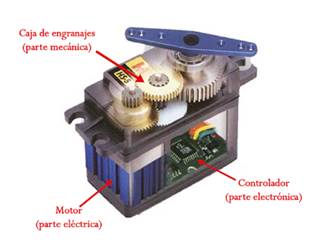
También conocido como servo, es un actuador que tiene la capacidad de ubicarse en cualquier posición angular, por medio de señales de control PWM dentro de su rango de operación, que es el límite de grados en el cual opera. Generalmente, se encuentran con un rango de 0 a 180°, siendo los que más se utilizan en diversas aplicaciones. Aunque también se pueden encontrar de rotación continua, esto significa que pueden rotar de 0 a 360° y viceversa. En la Figura 7 se muestra la parte interna de un servomotor
2.1.7 Estándares nacionales para la separación de residuos
En Colombia se generan aproximadamente 9.488.204 toneladas de residuos sólidos al año, de las cuales se reciclan, aproximadamente, 1.775.191 toneladas 20. Entre estos materiales aprovechables se encuentran vidrio, papel, cartón, chatarra, entre otros. Se destaca principalmente el plástico, cuya recuperación y aprovechamiento se hace necesaria para contribuir en la reducción de los índices de contaminación de los ecosistemas y los daños al medioambiente, salvando grandes cantidades de recursos naturales.
En Colombia rigen normas que avalan el buen manejo para la disposición final de los residuos aprovechables y no aprovechables, como el Decreto 605 de 1996, que reglamenta la Ley 144 de 1994 en cuanto al manejo y disposición final de los residuos sólidos; la Resolución 2184 de 2019, que modifica la Resolución 668 de 2016 para el uso adecuado de bolsas plásticas y se adoptan otras disposiciones para los residuos.
A partir del 1° de enero del 2021 comenzó a regir la nueva designación de colores para la disposición de los residuos aprovechables y no aprovechables, establecida por el Ministerio de Medio Ambiente y Desarrollo (Figura 8).

Blanco: residuos aprovechables (papel, cartón, plástico, vidrio, metales).
Verde: residuos orgánicos aprovechables (restos de comida, desechos agrícolas).
Negro: residuos no aprovechables (papel higiénico, servilletas, papel y cartón contaminados con comida, papeles metalizados).
2.2 Diseño experimental
Para la elaboración del prototipo propuesto se establecieron las siguientes etapas: primero, se hará una revisión de las tecnologías que se encuentran disponibles para dar solución al problema. Posteriormente, se hará el diseño del prototipo y, finalmente, se realizarán pruebas para garantizar su correcto funcionamiento.
2.2.1 Tecnologías disponibles
Para dar solución al problema planteado se analizaron y revisaron tecnologías de bajo costo disponibles en el mercado. Se seleccionaron dos: Raspberry Pi 3 y Arduino Uno, cuyas especificaciones se presentan en la Tabla 1.
Tabla 1
Tecnología disponible
Respecto al hardware, son dos placas totalmente distintas, ya que Arduino sólo permite ejecutar un código a la vez y Raspberry Pi tiene mucho más potencial, asemejándose a un computador personal, en el que se pueden ejecutar múltiples aplicaciones en paralelo. En la Tabla 2 aparecen las diferencias entre estos dos dispositivos.
Tabla 2
Principales diferencias entre Raspberry Pi y Arduino Uno
Independiente de la placa controladora que se elija, es importante tener presente las tecnologías disponibles para la captura y reconocimiento de voz. Existen alternativas por hardware como el módulo elechouse v3, disponible para Arduino, y por software como la librería Speech reconigtion para Raspberry Pi 3. En la Tabla 3 se hace una comparación entre estas dos tecnologías.
Tabla 3
Comparación entre Speech Reconigtion y Elechouse V3
2.2.2 Prototipo de prueba con tecnología Elechouse V3
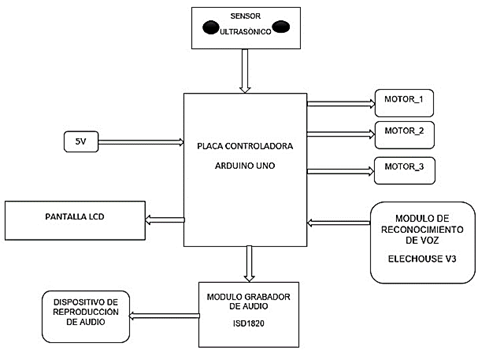
De las tecnologías analizadas para el reconocimiento de voz se optó por diseñar e implementar un prototipo de pruebas con Arduino, tomando en cuenta la disponibilidad de recursos con que se contaba al inicio del proyecto. Este sistema estaba conformado por una placa electrónica de hardware libre Arduino Uno en la parte de control, un sensor ultrasónico para la detección de personas, un módulo elechousev3 para el reconocimiento de voz, el cual permite reconocer hasta siete comandos de voz y se pueden grabar 255 palabras. Para la grabación se utilizó el módulo ISD1820, en el que se grabó un mensaje para reproducir a través de un parlante (speaker), una vez el sensor ultrasónico detectaba un obstáculo. Para la visualización se dispuso de una pantalla LCD 16x2, en la que se podía apreciar el mensaje grabado. Para la apertura y cierre de los contenedores se instalaron tres servomotores, los cuales estaban programados para activarse de forma independiente cuando el usuario mencionara la palabra previamente grabada en el módulo de reconocimiento voz (Figura 9).
2.2.3 Diseño y prototipo seleccionado para la solución del problema
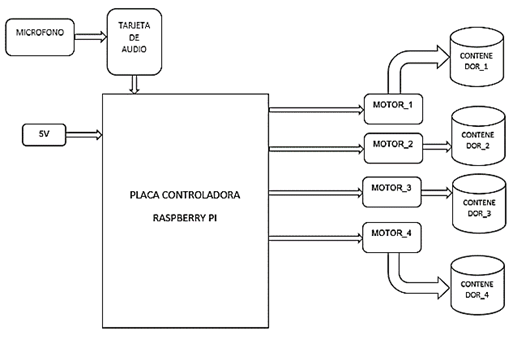
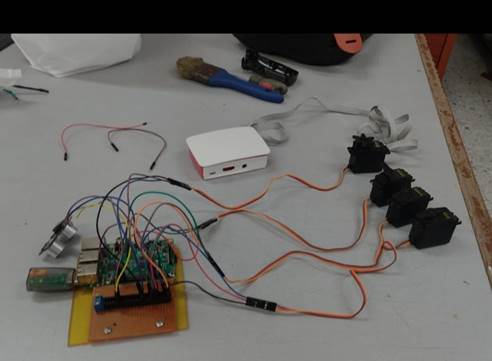
Después de realizar las pruebas del prototipo con Arduino y ver sus limitaciones en cuanto a cantidad de palabras que debía reconocer y el reconocimiento de voces con timbres diferentes, se optó por escoger una tecnología que no dependiera de un entrenamiento previo de voz. Se decidió utilizar el Raspberry Pi, que sigue siendo económico y además brinda mayor robustez. Con esta tecnología se llegó al diseño propuesto en la Figura 10. Está conformado por una placa electrónica de hardware libre Raspberry Pi en el control, un micrófono interconectado a través de una tarjeta de audio para capturar la voz, la cual se procesa internamente con la librería speech recognition, que utiliza diversos sistemas de reconocimiento de voz, como los de Google y Bing, convirtiendo de voz a texto y reconociendo cualquier palabra. Para la apertura y cierre de los contenedores dispone de cuatro servomotores, programados para que se active de forma independiente en el momento en que el usuario mencione una palabra que se relacione con una de las categorías de reciclaje utilizadas y definidas en un algoritmo de Python. El sistema se alimenta con una fuente alámbrica de 5V DC.
3 ANÁLISIS Y RESULTADOS
Para garantizar que el diseño propuesto funcione de manera correcta se propone tener en cuenta lo siguiente.
3.1 Implementación de un prototipo funcional
A continuación, se habla sobre el diseño e implementación del prototipo.
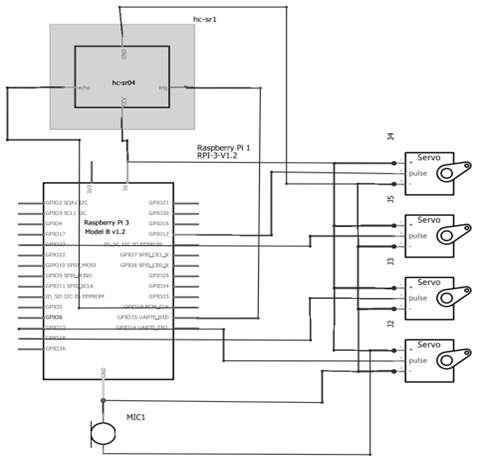
3.1.1 Diseño del circuito
Para desarrollar este prototipo se diseñaron un circuito esquemático (Figura 11) y el diagrama de hardware (Figura 12). El diseño general se mencionó en el numeral 2.2.3.: una placa electrónica de hardware libre Raspberry pi en la parte de control; un micrófono interconectado a través de una tarjeta de audio para realizar la adquisición de la voz, procesada con las librerías speech recognition de Google y cuatro servomotores.
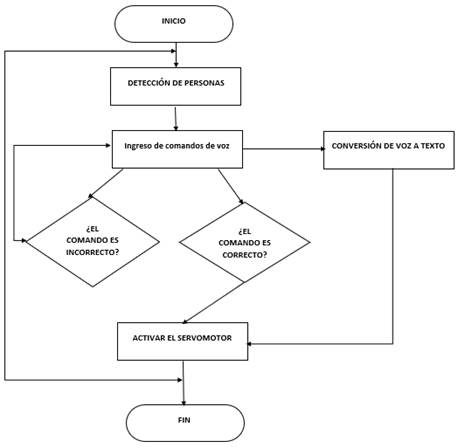
3.1.2 Diagrama de flujo
Para explicar el funcionamiento de este código se creó un diagrama de flujo (Figura 13). El código funciona de la siguiente manera: primero, se realiza la detección de personas por medio de un sensor ultrasónico; luego, se habilita automáticamente el micrófono para ingresar el comando de voz que corresponda (cartón, plástico, vidrios orgánicos, bolsas plásticas, botellas plásticas, entre otros). Posteriormente se realiza la conversión de voz a texto internamente en las raspberry, por medio de la librería speech recognition. Esta librería utiliza aplicaciones de conversión de diversas empresas, comúnmente entrenadas a través de redes neuronales y aprendizaje profundo. Si el comando de voz es correcto se activa un servomotor asociado con dicho comando, que permite realizar la apertura del contenedor correspondiente. Si es incorrecto no se activa ningún servomotor y, por ende, no se abre ningún contenedor.
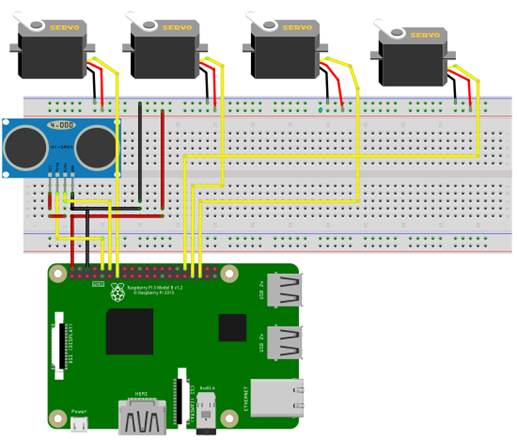
3.1.3 Adaptación del prototipo a los botes de basura
Una vez realizado el circuito esquemático del prototipo, se ensambló la tarjeta del circuito final, en la que están interconectados todos los componentes (Figura 14). Se utilizaron canecas de basura reales, a las cuales se les acoplaron los motores en las tapas. Para permitir la apertura y cierre de las tapas de una manera más eficiente, se implementó una base para su acople (Figura 15), para garantizar estabilidad.

3.2 Verificaciones necesarias de funcionamiento
3.2.1 Conexión a la red
Una falla que se puede presentar en el funcionamiento del prototipo se da al momento de reconocer los comandos de voz para activar los motores, ya que todo el sistema debe estar conectado a la red inalámbrica o cableada. Esto se debe a que la conversión de voz a texto que realiza la librería speech reconigtion se hace con redes neuronales implementadas en línea de empresas como Google, IBM o Bing.
3.2.2 Instalación correcta de librerías
Para garantizar el correcto funcionamiento del código se deben instalar las librerías principales que permiten realizar el reconocimiento de la voz (speech recognition y Pi Audio). En el sistema operativo Raspbian de las Raspberry Pi se pueden instalar a través de la terminal de Linux, utilizando el comando pip install, como se detalla a continuación.
Paso 1: instalar la biblioteca speech recognition.
Para instalar esta librería se debe ejecutar el siguiente comando en la consola de Linux: sudo apt-get install speech recognition (Figura 16).
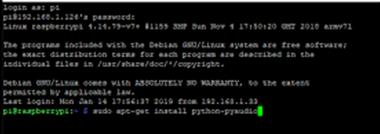
Para instalar esta biblioteca se ejecuta el siguiente comando: sudo apt-get install python3-pyaudio (Figura 17).
3.2.3 Configuración de la tarjeta de sonido
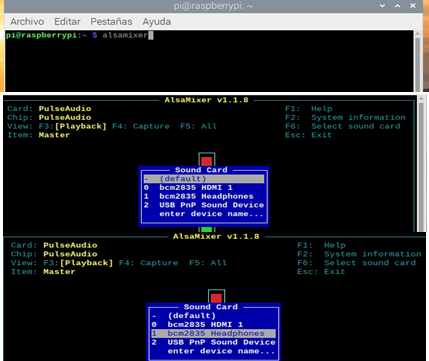
Para configurar la tarjeta de audio se debe ingresar a la consola de Linux y escribir el siguiente comando: alsamixer. Luego, se selecciona la tarjeta que está conectada. Se sube el volumen si se encuentra en un nivel bajo (Figura 18). Es necesario configurar la tarjeta de sonido que se está utilizando para que el software funcione de manera óptima.
3.3 Pruebas de usuario
Se realizaron pruebas con usuarios reales (Figura 19) para garantizar el funcionamiento del prototipo. Allí se detectaron y corrigieron las posibles fallas.

3.3.1 Entonación de las palabras
Se detectó que el sistema responde bien con diferentes tonos de voz en los comandos mencionados. Se realizaron pruebas con mujeres y niños entre 10 y 12 años, ya que este grupo, en su mayoría, habla con suficiente claridad. En las pruebas con hombres, en diferentes rangos de edad, se logró identificar que la librería que utiliza el sistema para realizar la conversión de voz a texto funciona sin ningún inconveniente. El porcentaje de precisión del instrumento es alto.
3.3.2 Pruebas de ruido
En condiciones de poco ruido el sistema responde mejor que en condiciones ruidosas, ya que la forma de adquisición de los comandos de voz se hace a través del micrófono, y se debe hablar mucha más fuerte para que funcione correctamente.
3.3.3 Pruebas de reconocimiento de voz
El dispositivo no presenta dificultad para reconocer e identificar distintos tipos de voz, siempre y cuando se cuente con una conexión estable a internet, porque si es inestable o la persona habla demasiado bajo el dispositivo presenta dificultades para reconocer los comandos de voz o es posible que no los identifique.
3.3.4 Pruebas de distancia para el reconocimiento de voz
En espacios abiertos, el sistema reconoce los comandos de voz a 15 cm, desde la boca hasta el micrófono. Esta distancia puede variar dependiendo de las condiciones ruidosas del ambiente. En espacios cerrados, como una vivienda, la distancia efectiva desde la boca hasta el micrófono es de 60 cm. Esta distancia puede variar dependiendo de la fuerza con que el usuario mencione los comandos y las condiciones de ruido del ambiente donde esté ubicado el dispositivo.
3.3.5 Pruebas de conexión a las redes cableada e inalámbrica
El sistema permite realizar la conexión a la red a través de cableado por un puerto de tipo RJ45 o de manera inalámbrica mediante wi-fi. Al realizar las pruebas de conexión de ambos sistemas se identificó que el prototipo funciona correctamente y es más estable conectado a cable de red, por lo que se recomienda esta opción.
3.3.6 Tiempo de respuesta de los servomotores
El tiempo de respuesta de los servomotores que permiten la apertura y cierre de los contenedores es de dos segundos. Una vez se mencione el comando de voz y la tapa de la caneca se abra, ésta permanece abierta durante 30 segundos, tiempo disponible para que el usuario tire la basura en el contenedor correspondiente. Cuando transcurra este tiempo la tapa se cierra.
3.3.7 Tiempo de respuesta para el reconocimiento de la voz
El tiempo de respuesta para el reconocimiento de la voz y la conversión a texto depende de la velocidad de internet donde esté conectado el dispositivo. Si se cuenta con buena conexión a la red el tiempo de respuesta se reduce a milisegundos. También depende del tono de voz de la persona, de la similitud entre palabras y de la búsqueda interna que realiza la librería.
CONCLUSIONES
La separación adecuada de residuos es un tema de interés general por el impacto que tiene sobre el medioambiente y los ecosistemas. A pesar de que se han implementado campañas que enseñan sobre este tema, las personas aún no toman conciencia sobre el correcto uso de las canecas, según el código de colores para separar los residuos.
Por esta razón, este trabajo aporta una solución viable, con tecnologías de la cuarta revolución industrial, para ayudar a generar cultura y conciencia sobre este tema tan importante. Actualmente se cuenta con tecnologías como Siri, Google y diversos asistentes de voz que podrían ayudar a que este prototipo evolucione y se pueda integrar con otros servicios de voz.
A futuro, este proyecto podría mejorarse agregando otros tipos de sensores que permitan mejorar el sistema de identificación de residuos, mediante técnicas combinadas de voz y visión artificial para la detección visual de los diversos materiales que se deseen reciclar, realizando una comparación entre lo que dice el usuario y lo que ve la cámara para generar conciencia sobre la importancia del correcto uso de los contenedores de basura.